Aktuellste BLHeliSuite Version.
BLHeli Suite Einstellungen erklärt
ESCs flashen mit Cleanflight und BLHeli Bootloader
Mein Online – Notizbuch / Gehirn
EMAX Simon Series 12A für Multirotor
Multicopter Professional

Yinyanmodel.LTD
www.emaxmodel.com
made in China
| Input Voltage | 1-3s Lipo |
| BEC Output | linear mode BEC 1A |
| Weight | 8 g |
| Firmware | Simon |
EMAX User Instruction for SimonK Series ESC
makerfire 20A BLHeli

Da am vorhandenen Ramps 1.4 Board der MosFet für das Heizbett defekt ist. habe ich gleich ein neues Set bestehend aus
1 x Arduino MEGA 2560 R3 kompatibles Board
1 x Ramps 1.4 Board
5 x A4988 Schrittmotorentreiber
1 x 12864 LCD Controller
bei Roboter-Bausatz.de bestellt.
In den Mähroboter aus dem 3D-Drucker möchte ich versuchen die Induktionschleifenerkennung des ArduMowers nachbauen und in den 3D-Mähroboter einzubauen.
Zur Seite bei Ardumower geht es hier
Weitere Informationen gibt es bei
Begrenzungsschleife – Induktionsschleife
Hierzu habe ich bei marotronics.de folgende Teile bestellt:
2 x Schleifenempfänger Kit
 1 x LM386 Audio Verstärkermodul
1 x LM386 Audio Verstärkermodul
LM386 Audio-Verstärker-Modul mit 200-fach Verstärkung
Schaltplan Verstärkermodul
Datenblatt LM386
1 x Empfänger Spule
150mH
1 x Perimeter Sender Board mit Platinen Zubehör
 Perimeter Sender Board (Prototyp) mit Platinen Zubehör
Perimeter Sender Board (Prototyp) mit Platinen Zubehör
1 x Arduino Nano
 Arduino IDE-kompatibeles Board
Arduino IDE-kompatibeles Board
100% kompatibel mit Arduino Nano V3.0 ATmega328P-AU
Microcontroller ATmega328P-AU
ATmega328 Microcontroller
1 x Motortreiber
 Der Pololu Dual MC33926 Motor Treiber ist für Spannungen von 5 … 28V geeignet und für eine Dauerbelastung von 3A (Spitzenbelastung 5A) ausgelegt. Zwei Kanäle können unabhängig von einander angesteuert werden.
Der Pololu Dual MC33926 Motor Treiber ist für Spannungen von 5 … 28V geeignet und für eine Dauerbelastung von 3A (Spitzenbelastung 5A) ausgelegt. Zwei Kanäle können unabhängig von einander angesteuert werden.
Weitere Merkmale:
Überstromschutz
Stromsensoren
für den Arduino Einsatz geeignet
1 x INA169 Analog DC Current Sensor Breakout – 60V 2,5A / 5A
 Der Ina 169 Stromsensor ist ein Modul womit man Ströme in ein Bereich bis 5A messen kann. Zusätzlich zu anderen Strommodulen lässt sich der Messbereich durch schließen einer Lötbrücke auf 2,5 A anpassen. Auch andere Messbereiche sind möglich da die Option besteht einen eigenen Widerstand anstelle der 2 SMD Widerstände einzulöten. Das Modul kann mit Spannungen bis 60V DC arbeiten. Mit diesem Stromsensor ist es möglich auch kleine Ströme zuverlässig zu messen ohne das deren Messwerte groß voneinander abweichen.
Der Ina 169 Stromsensor ist ein Modul womit man Ströme in ein Bereich bis 5A messen kann. Zusätzlich zu anderen Strommodulen lässt sich der Messbereich durch schließen einer Lötbrücke auf 2,5 A anpassen. Auch andere Messbereiche sind möglich da die Option besteht einen eigenen Widerstand anstelle der 2 SMD Widerstände einzulöten. Das Modul kann mit Spannungen bis 60V DC arbeiten. Mit diesem Stromsensor ist es möglich auch kleine Ströme zuverlässig zu messen ohne das deren Messwerte groß voneinander abweichen.
Das ist auch der Grund weshalb er in den Ardumower Projekt verwendet wird. Auf der Platine 1.2 und 1.3 wird er verwendet um den Ladestrom zu überwachen und bei Bedarf die Ladung auch zu beenden.
Ebenso findet der INA169 Stromsensor Verwendung in den Perimeter bzw. Schleifensender. Dort sorgt er dafür das wenn der Ardumower sich in der Ladestation befindet die Begrenzungsschleife abgeschaltet wird um Energie zu sparen.
1 x DC-DC Spannungsregler LM2596S Step-Down Regler einstellbar

Daten:
Konstante Ausgangsströme von 2 – 3 A erfordern auf der Unterseite der Platine ein kleinen (Finger-)Kühlkörper der unterhalb des IC aufgeklebt werden muss.
Weitere Informationen zu den einzelnen Boards gibt es im Shop von marotronics.de – Link ist auf den Bildern.
Ich hab beschlossen als weiteres Druckprojekt einen Quadrocopter zu bauen. In diesem Beitrag halte ich mal fest, was ich vor habe und was ich verbaue.
FPV = first person view
Was wird für einen Quadrocopter benötigt
Ich hab mir zum Anfang eine Flysky FS-T6-RB6 bestellt. Hierzu benötigt man noch Akkus mit einem entsprechendem Ladegerät. Die gleiche Steuerung gibt es auch bei Conrad unter der Bezeichnung Modelcraft. Hier findet man auch eine Beschreibung in deutscher Sprache.Fernsteuerung 6 Kanäle RC Sender mit Empfänger

In die Fernbedienung passen 8 Mignon-Batterien (z. B. Best.-Nr. conrad.de 650117) oder Akkus die über die Ladebuchse mit einem 12V-Netzteil geladen werden können.
Den Rahmen werde ich selber drucken. Als Druckprojekt habe ich mir den PEON230 – Quadrocopter auf www.thingiverse.com herausgesucht. Der Copter wurde von Tech2C entworfen und auch schon ein paar mal erfolgreich nachbebaut.

Den Rahmen werde ich zum großen Teil aus PLA drucken.
Vorgaben zum Drucken:
Layerhöhe: 0,2mm
1 x Rahmen Unterteil, 30% Füllung
1 x Rahmen Oberteil, 30% Füllung
4 x Arm, 100% Füllung
2 x Armbefestigung, 100% Füllung
1 x Kamerahalter FPV, 30% Füllung
1 x Kamerahalter HDCam, 30% Füllung
Sinnvolle Erweiterungen für den Rahmen:
Landefüße von Captain_sq bei www.thingiverse.com
Batteriehalter von Captain_sw bei www.thingiverse.com
FC = flight controllerMögliche Kandidaten:
KISS
KISS CC
Betaflight
Naze32 V6
Platinengröße: 36x36mm
Gewicht: 6g
2000 °/Sekunde 3-axen MEMS Gyro + Accelerometer (MPU6050)
3-axen Magnetometer (HMC5883L)
Drucksensor (MS5611)
Quad/Hexa/Tri/Bi/Y4/Y6/Octo/Camera Gimbal.
Bis zu 8 RC Eingänge
Moderner 32-bit Prozessor 3.3V/72MHz.
Onboard USB für Setup und Konfiguration
sehr helle LED’s
MultiWii-based Konfigurationssoftware
Als Flugestuerung hab ich nach langem hin und her eine Naze32 V6 10DOF bestellt.

Die LEDs bedeuten folgendes:
Blau = ON/OFF/BootLoaderModus (FunktionsStatus des FC)
Grün = Arm/Disarm (GefahrenStatus des FC)
Rot = Angle/Horizon/Acro (FlugModusAnzeige des FC)
Blau aus = FC aus
Blau leuchtet durchgehend = BootLoaderMode
Blau blinkt = FC normal in Betrieb
Grün blinkt (oder aus) = DisArm
Grün leuchtet durchgehend = Armed
Rot leuchtet = AcceleroMeterSelbstStabilisierung aktiv
Rot aus = FreiFlugModus (Acro)
Mögliche Kandidaten:
– Baseflight
– Cleanflight
Da ich im Internet eine recht ausführliche Anleitung von Philipp Seidel gefunden habe, habe ich mich für Cleanflight entscheiden.
– Betaflight
Betaflight ist eine Weiterentwickllung von Cleanflight von Boris B.
Motorbezeichnung
2206 2300KV
22 mm Durchmesser
06 mm hoher Stator
2300 Umdrehungen pro Volt
Hier habe ich folgendes bestellt:
4x Neu X2204 2300KV CW CCW Bürstenloser Motor für QAV250 RC Quadrocopter Drohne

In der Beschreibung war zu lesen:
X2204 2300KV CW / CCW bürstenloser Motor für QAV250 RC quadcopter. Mit CNC-bearbeiteter 6061 T6 Billet-Aluminium-Kühlkörperdose und hochreiner Kupferwicklung maximiert es die Betriebseffizienz.Eigenschaften:
Herausnehmbarer / austauschbarer Rotor
Anzug für 5-6-Zoll-Propeller
CNC gefräste 6061 T6 Billet Aluminium Kühlkörperdose
Hochreine Kupferwicklungen maximieren die Effizienz
Präzision für maximale EnergieumwandlungSpezifikationen:
Drehung: CW / CCW
Typ: X2204
KV: 2300
Stromversorgung: 2 ~ 3S LiPo Batterie
ESC: 12A bürstenloser ESC (nicht enthalten)
Paketinformationen:
Paketgröße: 9.5 * 8 * 6cm / 3.8 * 3.2 * 2.4in
Paketgewicht: 146g / 5.1oz
White-Box-PaketPaketliste:
2 * X2204 2300KV CCW bürstenloser Motor
2 * X2204 2300KV CW bürstenloser Motor
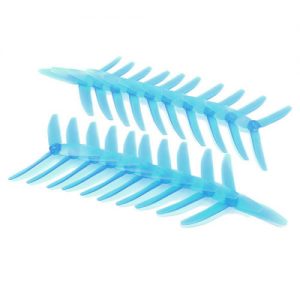
GEPRC 5040 V2 5 Inch 3 Blade Propeller Triblade Props Colver Prop Trans
ESC = electronic speed controller
Hier habe ich folgendes bestellt:
4Pcs 30A SimonK Brushless Speed Control ESC mit BEC für Quad Multirotor RC681

In der Beschreibung war zu lesen:
Eigenschaften:
Dieser Regler mit der SimonK-Firmware bietet Ihnen die perfekte Lösung für den Mehrmotorenbetrieb.
Höchster Wirkungsgrad 100% N-FET-Design.
Höchste Genauigkeit mit Quarzoszillator (die Temperatur beeinflusst nicht den PWM-Betriebsbereich wie andere billige Regler).
Keine Unterspannungsabschaltung, da bei einem Multirotor eine Abschaltung = Crash ist.
Kein Übertemperatur-Cutoff, da ein Cut-off in einem Multirotor = Crash ist.
Super hohe Bildwiederholrate, keine Pufferung des Eingangssignals, was zu einer Ansprechrate von mehr als 490Hz führt.
16 kHz Motorfrequenz, schnellste Reaktion des Motors und leisester Betrieb (kein 8 kHz Quietschen).
Super einfache, kinderleichte Bedienung! Nichts anderes als der Gasbereich programmieren.Spezifikationen:
Konstantstrom: 20A max
Spitzenstrom: 30A (10s)
Stromspannung: 2-3S
BEC: 5V / 3A
Artikelgröße: 50 x 25 x 8 mm / 2,0 „x 1,0“ x 0,3 „
23.06.2018 Die Motorregler sind die Tage gekommen. Allerdings sind diese für den PEON-230 viel zu groß. Ich habe nun noch folgende Regler bestellt:
4x EMAX Simon Series 12A Brushless ESC Mini Quadcopter Set SimonK

Hier war in der Beschreibung folgendes zu lesen:
EMax SimonK Series 12A Brushless ESC Speed Controller 1-3S Lipo for Quadcopter 4pcs
Specifications:
– Constant Current: 12A
– Input Voltage: 1-3 cell Lipoly
– BEC: Yes (linear) [Remove middle wire to dissable]
– BEC Output: 5V/1A
– PWM: 8 KHz
– Max RPM: 240,000rpm for 2 Pole Brushless Motor
– Size: 22*17*7
– Weight: 8g
Package included:
– 4* EMax 12A ESC
 In der Beschreibung war zu lesen:
In der Beschreibung war zu lesen:LiPo Akku
11.1V 1100mAh 65C 3S Lipo Battery XT60 PlugWas steht in der Bezeichnung:
LiPo = Lithium-Polymer
11.1V = Spannung die der Akku liefert, 3,7Volt Nennspannung pro Zelle, 4,22Volt Ladeschlussspannung pro Zelle
1100mAh = Kapazität / Strom den der Akku eine Stunde lang liefern kann
65C = Maximalstrom den der Akku abgeben kann (1100mA x 65 = 71,5A)
3S = 3 Zellen in Reihenschaltung
P-Wert = Anzahl der parallel geschalteten Zellen
Beschreibung
Der Rahmen wird aus Aluminiumprofil 20x20mm B-Typ NUT 6 aufgebaut.
Bauraum: 200x200x150mm
Stückliste

| Bild | Menge | Beschreibung |
 |
4 Stk. | X-Achse Aluprofil 20x20mm Länge 340mm |
| 4 Stk. | Y-Achse Aluprofil 20x20mm Länge 303mm |
|
| 4 Stk. | Z-Achse Aluprofil 20x20mm Länge 350mm |
|
| 2 Stk. | Druckbettauflage Aluprofil 20x20mm Länge 285mm |
|
| 1 Stk. | Druckbettauflage Aluprofil 20x20mm Länge 135mm |
|
| 48 Stk. | Schraube M4x8mm | |
| 48 Stk. | Gewindeplatte M4 | |
| 24 Stk. | Winkel 20 B-Typ |
Aufbau Rahmen
Der Rahmen muss winklig aufgebaut sein !!!
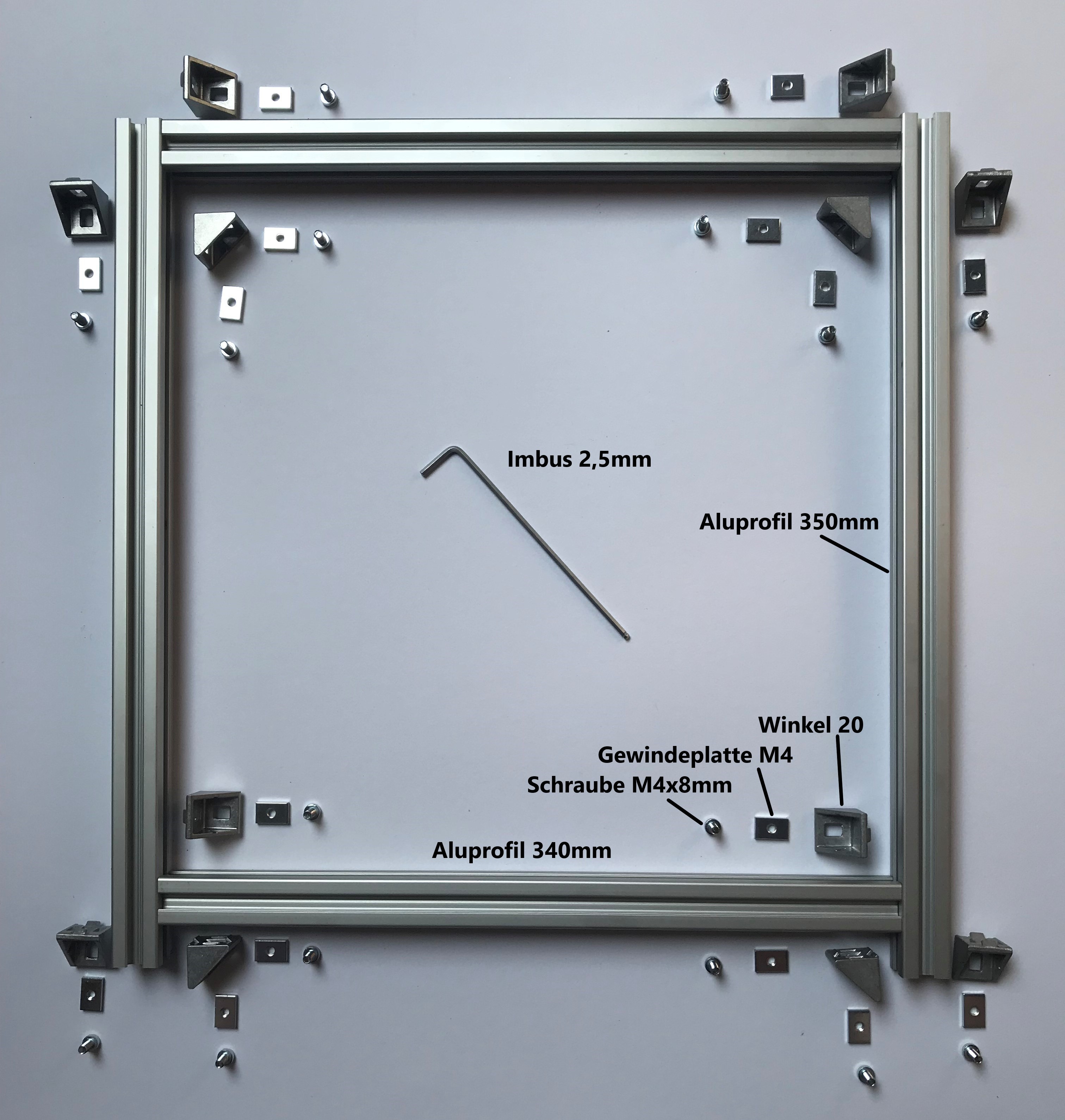
Die Teile die für den Zusammenbau des hinteren Rahmens benötigt werden.

Die linke obere Ecke. Die rechte Ecke wird spiegelbildlich aufgebaut.

Die linke, obere Ecke. Die rechte Ecke wird spiegelbildlich aufgebaut.

Die linke, untere Ecke. Die rechte Ecke wird spiegelbildlich aufgebaut.

Die linke, untere Ecke. Die rechte Ecke wird spiegelbildlich aufgebaut.

Hinterer Rahmen, der vordere wird gleich aufgebaut. Das auf dem Bild gezeigte Teil wird also zwei mal benötigt.
Aufbau Druckbettauflage
Muss winklig sein !!!
Am Mendel habe ich die Umlenkrollen, die ich aus Multiplexplatten gefertigt hatte, gegen einen gedruckten Umlenkrollenhalter mit integrierter Spannmöglichkeit ausgetauscht.



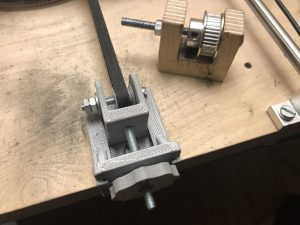
Grundlage für den Umbau habe ich bei www.thingiverse.com gefunden. Den Schlitten für die X-Achse habe ich in OpenSCAD, so dass dieser um 90° gedreht ist, neu gezeichnet.
Heute 16.04.2018 habe ich den WORX-Landroid SB450 WR102SI.1 beim Bauhaus in Pforzheim gekauft.
20 V, Li-Ionen, 2 Ah, Max. Flächenempfehlung: 450 m²

Gründe für den Umbau:
Die erforderlichen Teile habe ich bestellt bez. werden aus Hartholz hergestellt. Später werden die Holzteile mit ABS gedruckt.
LongDistance J-Head V6
Nozzle 0,4mm
1,75mm Filament
Da ich festgestellt habe, dass der Drucker gegen Zug empfindlich ist, habe ich den gesammten Druckbereich eingehaust.
Bilder folgen