EMAX Simon 12A mit BLHeli flashen
BLHeli ESCs kann man in zwei Hardwarevarianten, unterschieden durch die MCUs von SiLabs und Atmel, unterteilen. Die Programmieradapter für die beiden Hardwarevarianten sind teilweise unterschiedlich.
Beide ESC-Varianten unterstützen Bootloader. Ein Bootloader ist ein kleiner Teil der ESC-Firmware, welche das Updaten und Parametrieren der ESCs über die Signalleitung zulassen.
Alle Versionen der Atmel-ESC unterstützen Bootloader, Bootloader sind aber nicht in allen ESC installiert. Es gibt zwei Versionen der Atmel-Bootloader, eine SimonK- und eiine BLHeli-Version. Die beiden Versionen stellen unterschiedliche Anforderungen an den Programieradapter.
SiLab Firmware Versionen ab Rev 13.2 und neuer unterstützen Bootloader und sind grundsätzlich Teil der Firmware – bedeutet alle ESCs ab Rev. 13.2 haben einen Bootloader. Vor der Rev 13.2 hatten die ESCs keinen Bootloader. SiLab ESCs untersttützen nur den BLHeli-bootloader.
Unfortunately there are also other hardware differences among ESCs. Often SiLabs ESCs have a resistor on the signal input, and due to this resistor some programming sticks can not be used. Also, some Atmel ESCs have a transistor based inverter on the input, and a bootloader can not be used with these ESCs.
This document describes some of the more common methods and adapters, but is not an exhaustive list on connection options.
A special note on the 4-way interface (4w-if). This is a code for the Arduino and various programming boxes that is very versatile.
4-way interface (4w-if) können verwendet werden für
– SiLab initial flash over C2 interface
– SiLab BLHeli bootloader interface
– Atmel BLHeli bootloader interface
– Atmel SimonK bootloader interface
Original – Programming adapers for BLHeli –
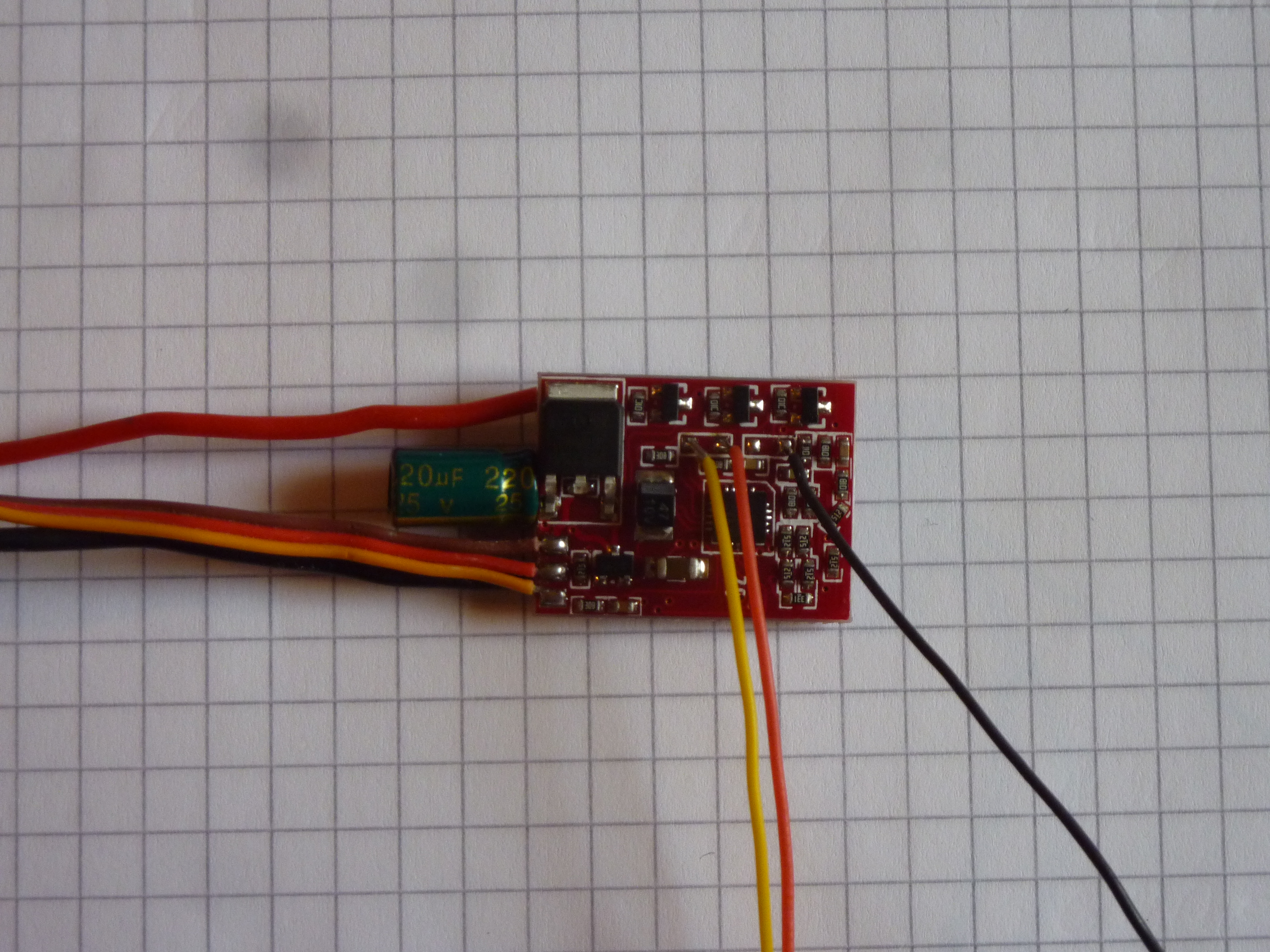
- Vorbereitung ESC
– ESC auspacken, Schrumpfschlauch entfernen
Im Bild ist ein EMAX Simon 12A ESC
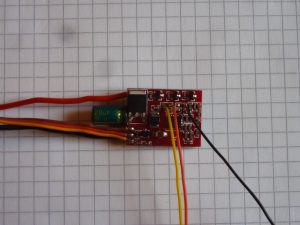
– Adern an die Lötpads anbringen.
schwarz = GND
leer = VCC
rot = C2CK (PD3)
gelb = C2D (PD2)
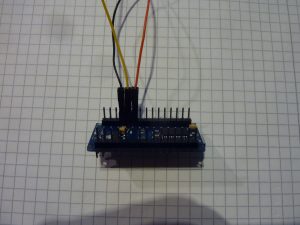
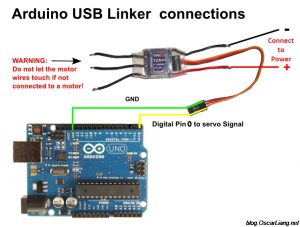
- Arduino vorbereiten
Arduino Nano99999999
- Software
BLHeli herunter laden
Aktuelle Version
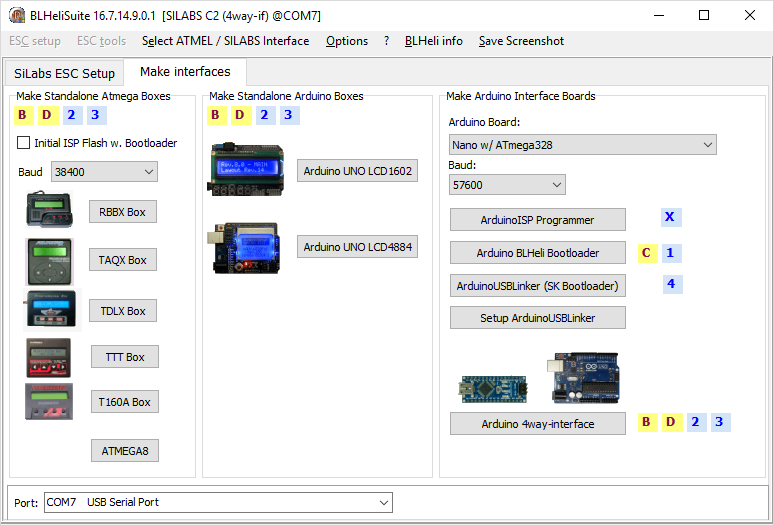
- Aus dem Arduino NANO ein Interface machen
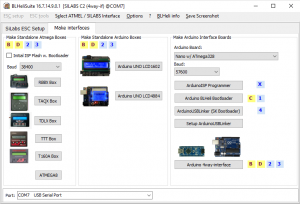
– USB-Port einstellen
– Arduino Board „Nano w/ATmega328“ auswählen
– Arduino 4-way-interface anklicken
– OK anklicken
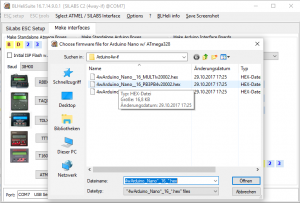
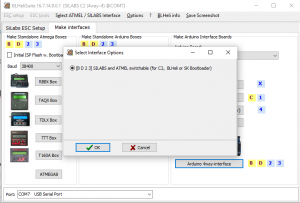
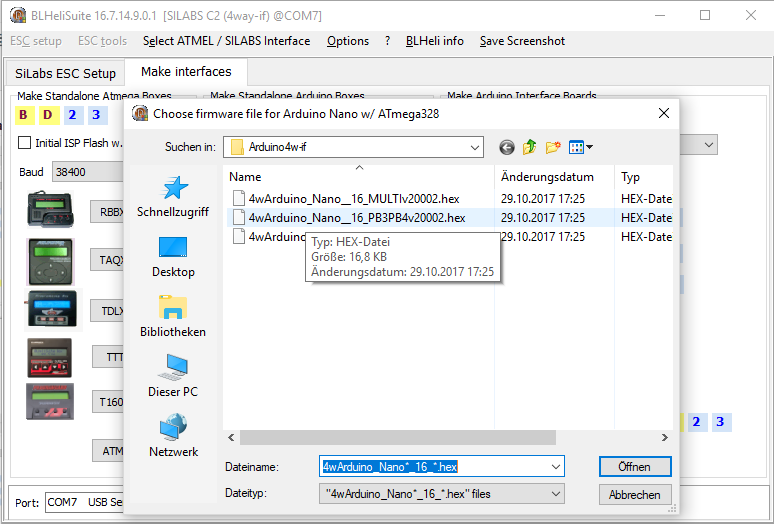
– 4wArduino_Nano__16_PD3PD2v20002.hex auswählen und öffnen
Der Dateiname gibt an auf welchen Pins die Schnittstellenleitungen liegen.
4w = 4way Interface
Arduino_Nano
16 = ???
PD3 = C2CK
PD2 = C2D
V20002 = Hex-Datei-Version
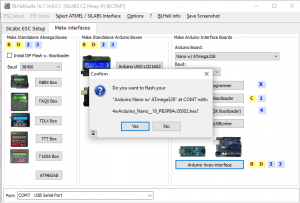
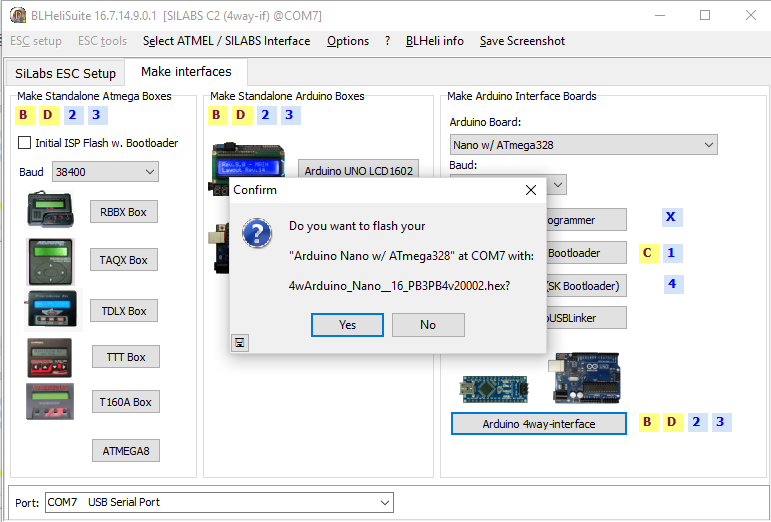
– mit yes bestätigen- Im letzten Bildschirm, wenn alle geklappt hat, noch mal mit OK bestätigen
- ESC flashen
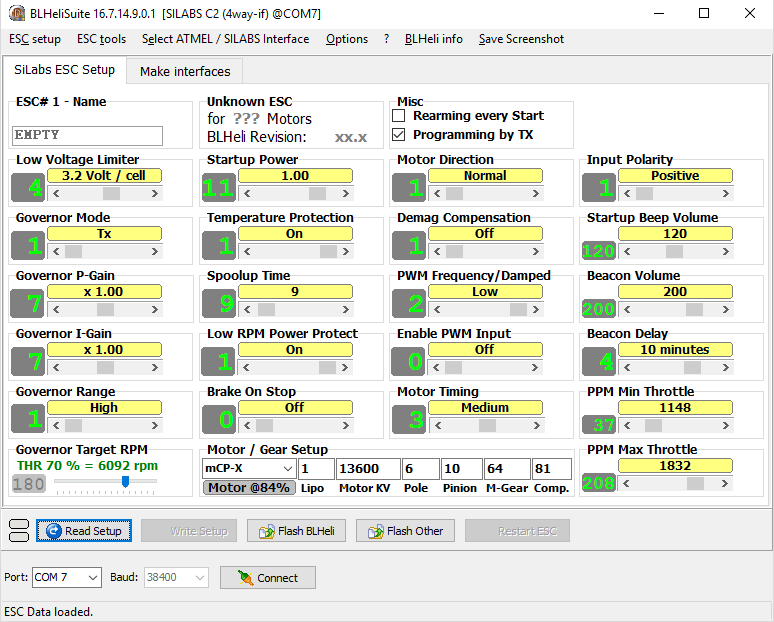
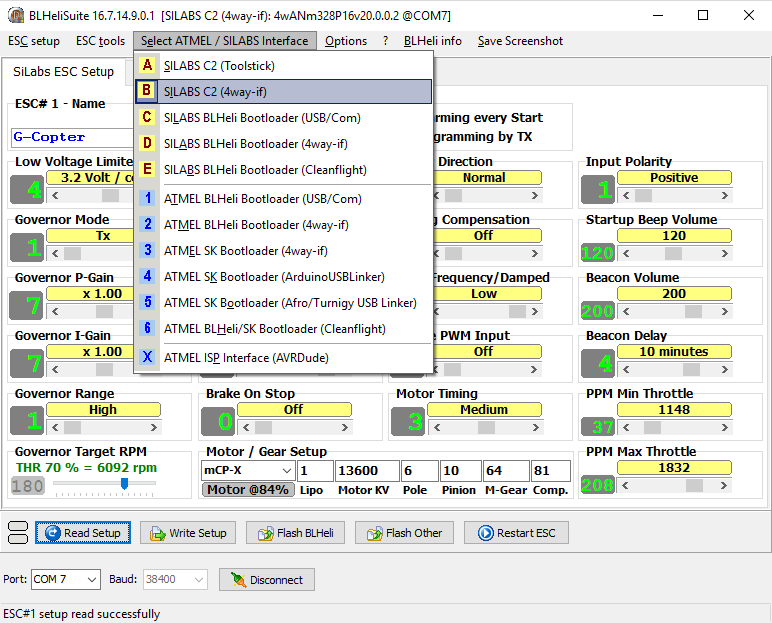
– USB-Port einstellen
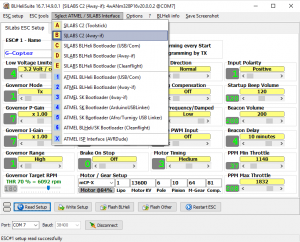
– SILAB Interface B auswählen
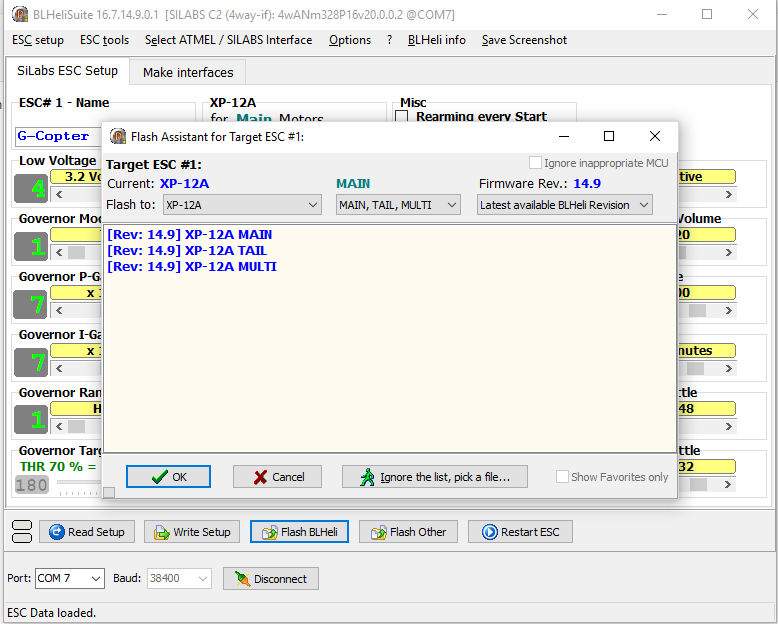
– Flash BL Heli anklicken
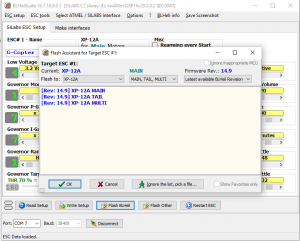
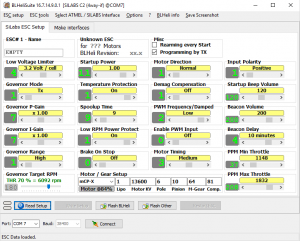
– Flash to auf XP-12A einstellen
– XP-12 MULTI auswählen
MAIN – Helikopter Hauptrotor
TAIL – Helikopter Heck
MULTI – für Einsatz im Multicopter
– OK anklicken
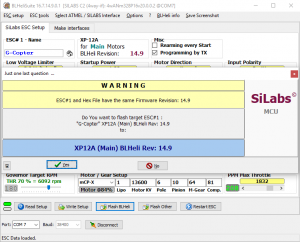
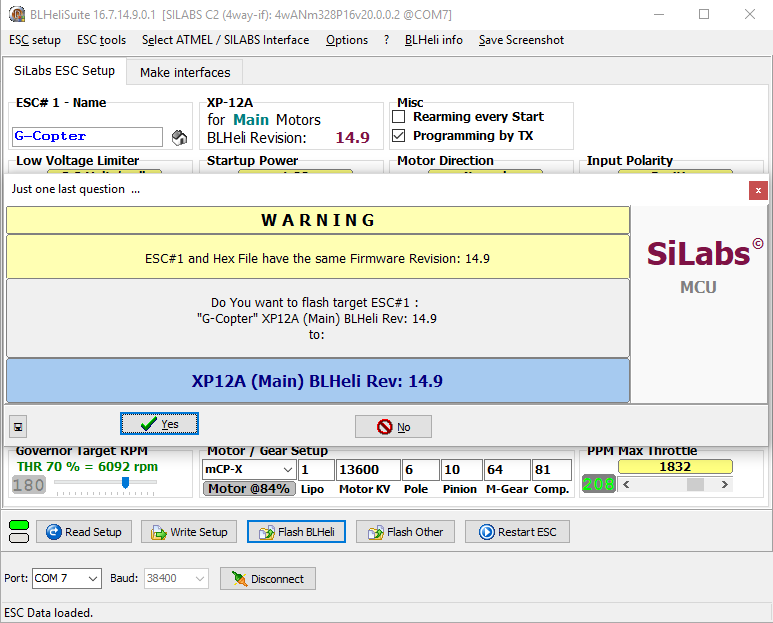
– Warnung mit YES bestätigen
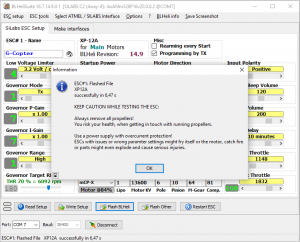
– Information mit OK bestätigen





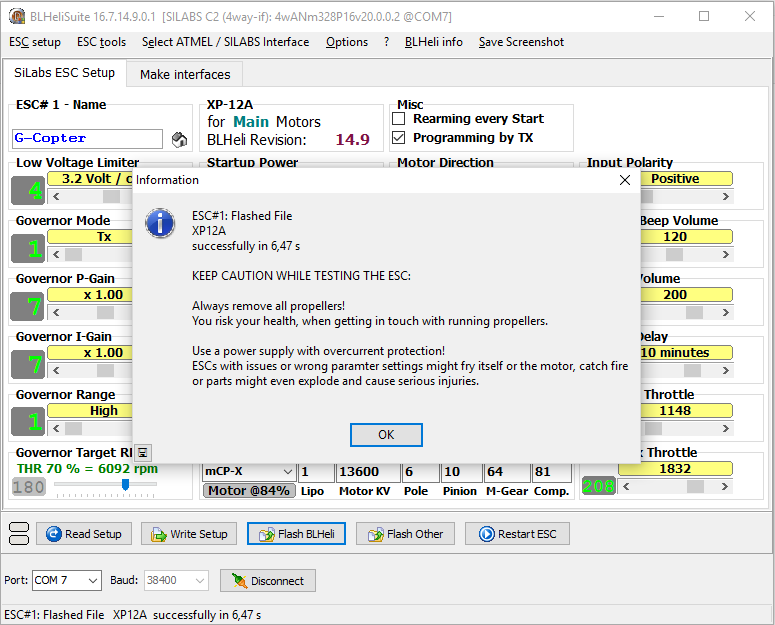








 In der Beschreibung war zu lesen:
In der Beschreibung war zu lesen: