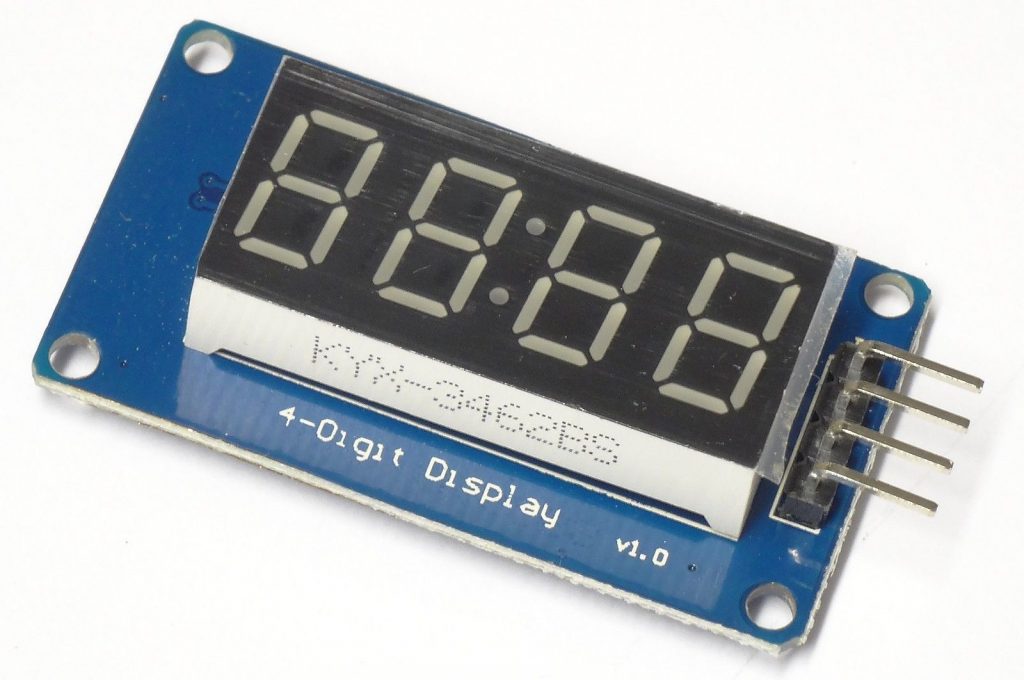
Anzeige Modul TM1637
Betriebsspannung: 3,3V / 5V
Strom 30-80mA
Beleuchtung in rot
Mein Online – Notizbuch / Gehirn
Anleitungen und Informationen zum Arduino
Anzeige Modul TM1637
Betriebsspannung: 3,3V / 5V
Strom 30-80mA
Beleuchtung in rot
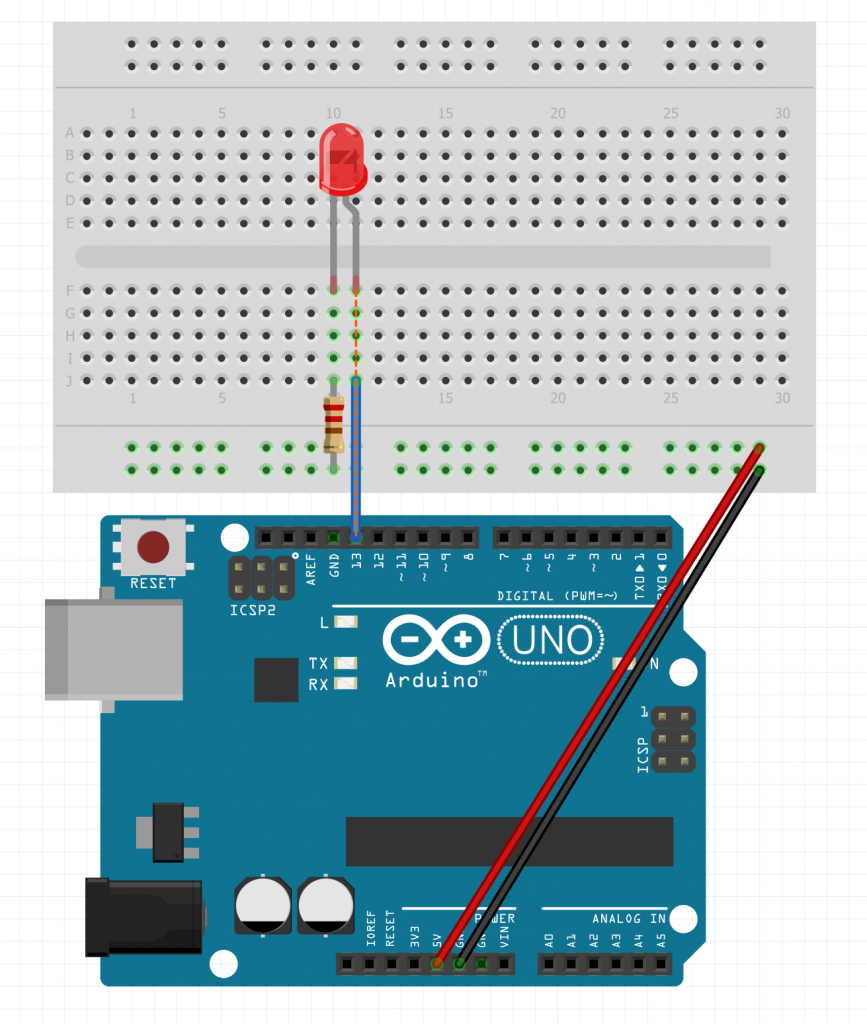
// blinkende LED
// Eine Leuchtdiode wird eine Sekunde an, und dann wieder eine Sekunde ausgeschaltet. Dieser Vorgang wird endlos wiederholt.
void setup() {
pinMode(13, OUTPUT); // Port 13 wird als Ausgang festgelegt
}
void loop() {
digitalWrite(13, HIGH); // Port 13 wird high geschaltet
delay(1000); // eine Sekunde warten
digitalWrite(13, LOW); // Port 13 wird low geschaltet
delay(1000); // eine Sekunde warten
}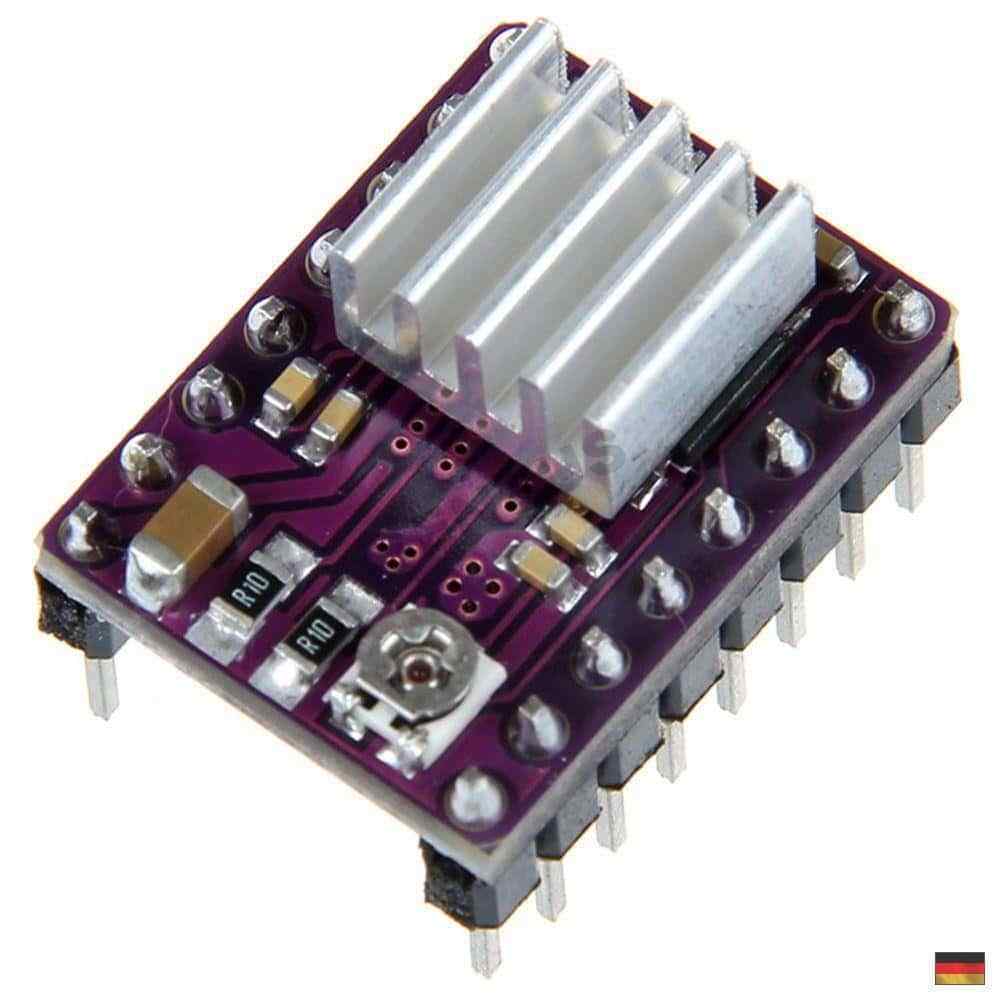
GND = Masse
DIR = Drehrichtung
STEP = SchrittSLEEP =RESET =
M2 =
M1 =
M0 =ENABLE =FAULT =
A2 = Motorwicklung A
A1 = Motorwicklung A
B1 = Motorwicklung B
B2 = Motorwicklung B
GND = Masse
VMOT = Spannungsversorgung 8 – 45V DC für Motor
https://iknowvations.in/de/arduino/drv8825-stepper-motor-driver-with-arduino-tutorial/
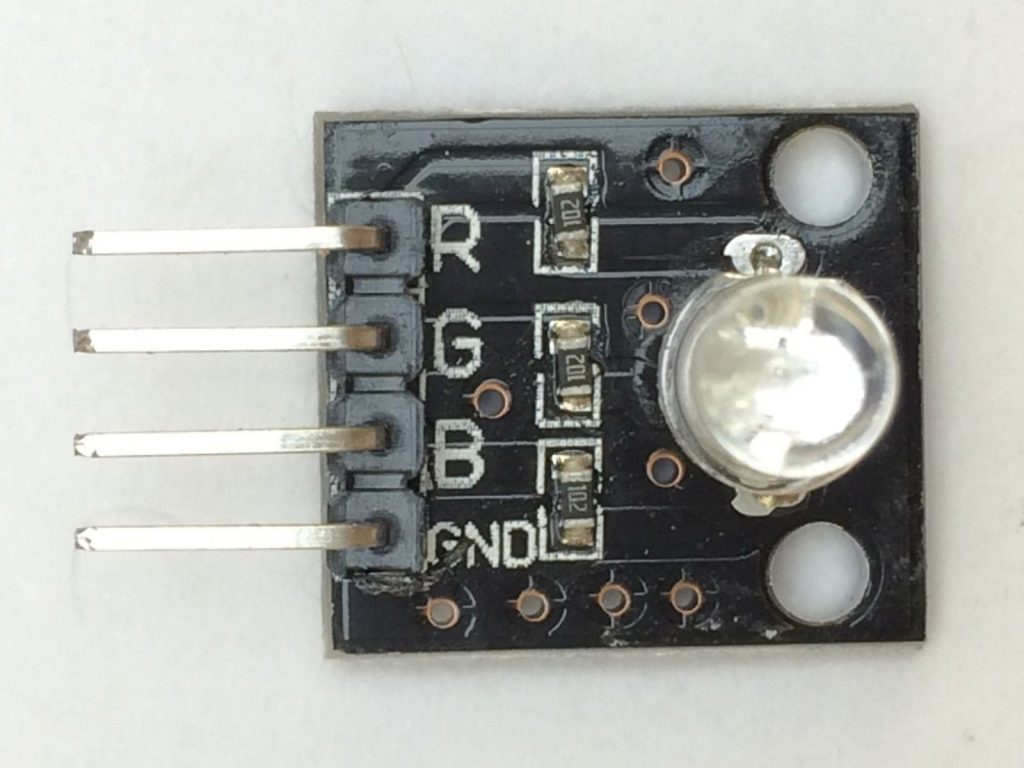
Vorwiderstände (102) mit 1kOhm sind auf dem Modul schon vorhanden.
Pinbelegung:
R = Rot
G = Grün
B = Blau
GND = Masse
// RGB LED-Modul
// Die vorhandenen Farben schalten
int BLAU = 13;
int GRUEN = 12;
int ROT = 11;
void setup() {
pinMode(BLAU, OUTPUT); // Port als Ausgang und als BLAU festlegen
pinMode(GRUEN, OUTPUT); // Port als Ausgang und als GRUEN festlegen
pinMode(ROT, OUTPUT); // Port als Ausgang und als ROT festlegen
}
void loop() {
digitalWrite(BLAU, HIGH); // Blau wird high geschaltet
delay(500); // warten
digitalWrite(BLAU, LOW); // Blau wird high geschaltet
digitalWrite(GRUEN, HIGH); // Gruen wird high geschaltet
delay(500); // warten
digitalWrite(GRUEN, LOW); // Gruen wird low geschaltet
digitalWrite(ROT, HIGH); // ROT wird high geschaltet
delay(500); // warten
digitalWrite(ROT, LOW); // ROT wird low geschaltet
}Ein Programm besteht grundsätzlich aus dem setup() – und dem loop() – Block.
Der setup()-Block wird einmal beim Neustart oder beim hochladen eines Programm auf den Arduino ausgeführt.
Der loop()-Block wird, nach dem setup()-Block, so lange zyklisch wiederholt bis der Arduino ausgeschaltet wird.
// Allgemeine Programmstruktur
//
// Ausgabe von "Hallo Welt" am Seriellen Monitor über die Serielle Schnittstelle
//
void setup() {
// initialisiere die serielle Kommunikation mit 9600bps:
Serial.begin(9600); }
void loop() {
Serial.println("Hallo Welt!" );
// warte 10ms bis zur nächsten loop()-Ausführung.
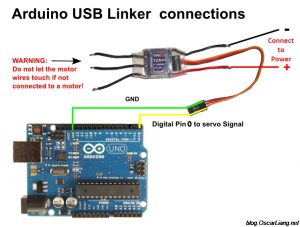
delay(10); }Achtung:
Wenn die Serielle Schnittstelle verwendet wird, dürfen die Ports 0 und 1 nicht verwendet werden.
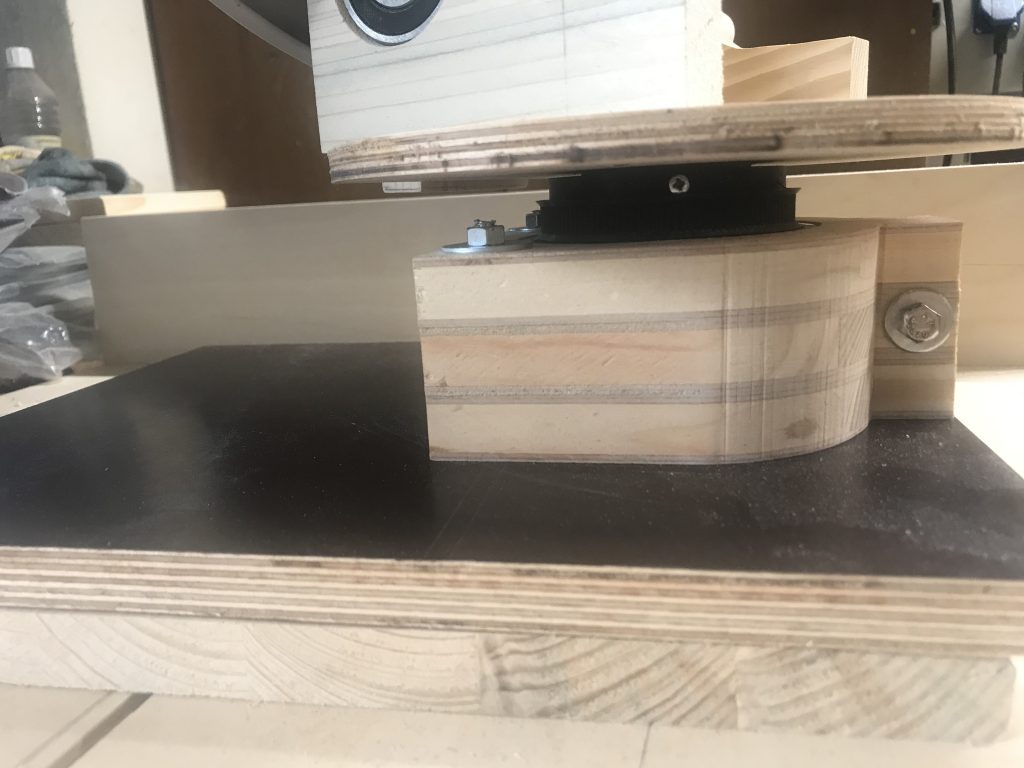
Die Hardware ist zum großen Teil aus Holz.
Die 3D-Drucke stammen von TNT3Dprint.de.
Zahnriemenscheibe Azimut:
teeth = 120; // Number of teeth
profile = 12; //12=GT2_2mm
motor_shaft = 50.1; // NEMA17 motor shaft exact diameter = 5
m3_dia = 3.2; // 3mm hole diameter
m3_nut_hex = 1; // 1 for hex
m3_nut_flats = 5.7; // normal M3 hex nut exact width = 5.5
m3_nut_depth = 2.7; // normal M3 hex nut exact depth = 2.4
retainer = 1; // Belt retainer above teeth
retainer_ht = 1.5; // height of retainer flange over pulley
idler = 1; // Belt retainer below teeth
idler_ht = 1.5; // height of idler flange over pulley
pulley_t_ht = 8; // length of toothed part of pulley
pulley_b_ht = 8; // pulley base height
pulley_b_dia = 70; // pulley base diameter
no_of_nuts = 3; // number of captive nuts required
nut_angle = 120; // angle between nuts
nut_shaft_distance = 1.2; // distance between inner face of nut and shaft

Der Lagerbockbesteht aus drei aufeinandergeleimte Multiplexplatten. In diese wurde unten und oben ein Lager, Innendurchmesser 50mm eingesetzt.
Lager: 2 x Rillenkugellager 6010 2RS 50 x 80 x 16 mm
Azimutwinkel berechnen:
A = Azimutwinkel
gLE = geographische Länge des Empfangsort
gBE = geographische Breite des Empfangsort
gLS = geographische Länge der Satelittenposition
tan(gLE – gLS)
A = 180° + arctan ————–
sin gBE
Für Astra mit 19,2 Ost würde das z.B. so aussehen:
gLE = 8,7582988 (Längengrad für Knittlingen)
gBE = 49,0240107 (Breitengrad für Knittlingen)
gLS = 19,2
tan(8,7582988 – 19,2)
A = 180° + arctan ——————-
sin 49,0240107
Elevation berechnen:
GPS-Koordinaten für Knittingen:
49° 1′ 26.439″ N
8° 45′ 29.876″ E
http://www.fen-net.de/satellitentechnik-online/texte/orbit/azimut.htm
// Azimut und Elevation berechnen
void setup() {
double A; // Azimutwinkel
double E; // Elevationswinkel
// Daten für Stuttgart
String Ort = "Stuttgart";
float gLE = 9.2L; // Längengrad Stuttgart
float gBE = 48.8L; // Breitengrad Stuttgart
// Daten für Berlin
/*String Ort = "Berlin";
float gLE = 13.4L; // Längengrad Berlin
float gBE = 52.5L; // Breitengrad Berlin
*/
String Satellit = "Astra 19,2 Ost";
float gLS = 19.2L; // Längengrad Astra
//string Satellit = "Eutelsat F2 10,0 Ost";
//float gLS = 10.0L; // Längengrad Eutelsat F2
// Die Grademaße in Bogenmaße umrechnen
float L = 3.14/180 * gLE;
float B = 3.14/180 * gBE;
float P = 3.14/180 * gLS;
// Azimut in Gradmaß berechnen
A = 180 + 180/3.14 * atan (tan(L - P) / sin(B));
// Elevation im Gradmaß berechnen
E = 180/3.14 * atan (((cos(B) * cos(L - P)) -0.1513) / sqrt(1-sq(cos(B) * cos(L - P))));
// initialisiere die serielle Kommunikation mit 9600bps:
Serial.begin(9600);
// Ausgabe der berechneten Winkel
Serial.println ("Ort: " + Ort);
Serial.println ("Satellit: " + Satellit);
Serial.print ("Azimut = ");
Serial.print (A);
Serial.print (" Elevation = ");
Serial.println (E);
}Für die Ansteuerung der Schrittmotoren wird ein RAMPS 1.4 – Shield verwendet. Folgende Anschlüsse werden verwendet
Azimut
E0 = Anschluss für den Schrittmotor „Azimut“
X_MIN = Endschalter Azimut MIN
X_MAX = Endschalter Azimut MAX
Elevation
E1 = Anschluss für den Schrittmotor „Elevation“
Y_MIN = Endschalter Elevation MIN
Y_MAX = Endschalter Elevation MAX
Der Kompassensor so wie eventuell weitere Sensoren werden über den I2C-Bus am RAMPS 1.4 angeschlossen
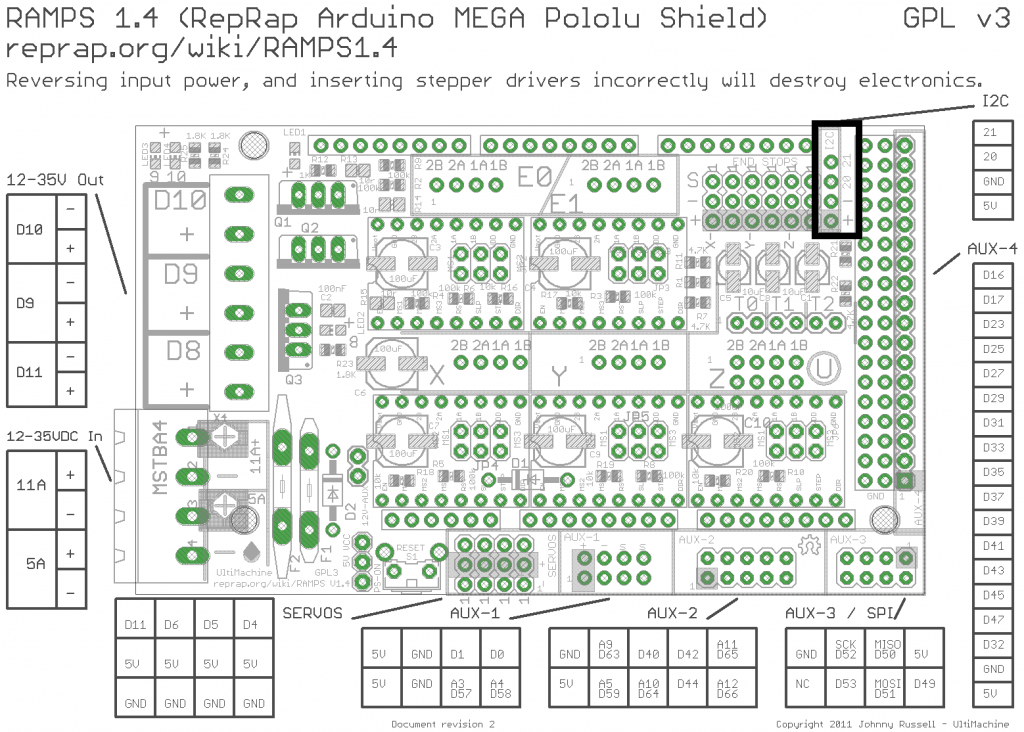
5V = rot
GND = schwarz
20 = blau
21 = grün
Das ist 433Mhz RF Transmitter mit Empfänger Satz für Arduino ARM MCU drahtlos
Anwendungsumgebung:
Fernbedienungsschalter, Empfängermodul, Motorräder, Automobil Antidiebstahlprodukte, Haussicherheitsprodukte, elektrische Türen, Verschlusstüren, Fenster, Fernbedienungssteckdose, Fernbedienung LED, entfernte Audiofernbedienung elektrische Türen, Werkstättentürenfernbedienung, Fernbedienung einziehbare Türen, entferntes Volumentor, Pantüren, Fernbedienungstürenöffner, Tür Schlussgerätregelsystem, Fernbedienungsvorhänge, alarmieren Gastgeber, Warnung, Fernbedienungsmotorradfernbedienung elektrische Autos, Fernbedienung mp3.
Spezifizierung:
Empfängermodul:
Produktmodell: Xd-rf-5v
Betriebsstromspannung: dc5v
Ruhiger Strom: 4ma
Empfang der Frequenz: 433.92 MHz
Empfängerempfindlichkeit:-105db
Größe:30x14x7mm
Transmitter:
Technische Rahmen dessen
Produktmodell: xd-fst
Startentfernung:20-200 Meter (verschiedene Stromspannung, verschiedene Ergebnisse)
Betriebsstromspannung:3.5-12v
Dimensionen: 19 * 19 Mm
Betriebsweise: Sind
Übertragungsrate: 4 Kilobyte / s
Übertragungspower: 10mw
Übertragungsfrequenz: 433 M
Pinbelegung von linkem → Recht: (Daten; VCC; GND)
& bitweise AND – Verknüpfung (bitwise and)
<< (bitshift left)
>> (bitshift right)
^ bitweise XOR – Verknüpfung (bitwise xor)
| bitweise OR – Verknüpfung (bitwise or)
~ bitweise NOT – Verknüpfung (bitwise not)
Bit Setzen
// Setzen von Bit 2 und 7 im Register // Die Bit's in Register werden mit B10000100 ODER verknüpft Register |= B10000100; // Nur Bit 2 und 7 werden auf 1 gesetzt, die restlichen Bits bleiben unverändert // entspricht Register = Register | B10000100; // oder Register |= (1 << Bit2); //Bit2 wird auf 1 gesetzt Register |= (1 << Bit7); //Bit7 wird auf 1 gesetzt // oder Register |= (1 << Bit2) | (1 << Bit7); //Bit2 und Bit7 werden auf 1 gesetzt
Bit löschen
// Löschen von Bit 2 und 7 im Register Register &= ~B10000100; // entspricht Register = Register & ~B10000100; // oder Register &= ~(1 << Bit2); // Bit2 wird auf 0 gesetzt Register &= ~(1 << Bit7); // Bit7 wird auf 0 gesetzt // oder Register &= ~(1 << Bit2) | (1 << Bit7); //Bit2 und Bit7 werden auf 0 gesetzt
Bit invertieren (umschalten)
// invertiert Bit 4 im Register Register ^= B00010000; // entspricht Register = Register ^ B00010000; // Invertiert Bit4 // oder Register ^= (1 << Bit4); // Invertiert Bit4
Bit abfragen
// abfragen des WGM12-Bits im TCCR1B Register byte bitStatus = (TCCR1B & (1 << WGM12)) >> WGM12; // oder mit // Bedingungsoperator bool bitStatus = (TCCR1B & (1 << WGM12)) == (1 << WGM12) ? 1 : 0;
Quellen:
arduino-projekte.webnode.at
Tabelle 1:
| Bit (n) | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| DDRx | DDxn | DDxn | DDxn | DDxn | DDxn | DDxn | DDxn | DDxn |
| PORTBn | D13 | D12 | D11 | D10 | D9 | D8 | ||
| PORTCn | A5 | A4 | A3 | A2 | A1 | A0 | ||
| PORTDn | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
| PINx | PINx7 | PINx6 | PINx5 | PINx4 | PINx3 | PINx2 | PINx1 | PINx0 |
| Ein- / Ausgangsports | ||||||||
x = Portnummer, n = Bitnummer
Beispiel:
Setzen der Binär-Pins D2 und D7 als Ausgang:
(D2 und D7 sind die Bits 2 und 7 am Port D)
DDRD |= B10000100; // Nur Bit 2 und 7 werden verändert // oder DDRD |= (1 << DDD2); //D2 ist Ausgang DDRD |= (1 << DDD7); //D7 ist Ausgang // oder DDRD |= (1 << DDD2) | (1 << DDD7); //D2 und D7 sind Ausgaenge
Ausgabe von logisch „1“ und logisch „0“ am Beispiel Binär-Pin D10:
(D10 ist das Bit 2 am Port B)
//D10 als Ausgang setzen DDRB |= (1 << DDB2); //D10 auf "1" setzen PORTB |= (1 << PORTB2); //D10 auf "0" setzen PORTB &= ~(1 << PORTB2);
Einlesen des Binär-Pins D5 mit internem Pullup-Widerstand:
(D5 ist das Bit 5 am Port D)
//D5 als Eingang setzen DDRD &= ~(1 << DDD5); //Pullup-Widerstand aktivieren PORTD |= (1 << PORTD5); //Abfrage des Eingangs-Pin D5 byte bitStatus = (PIND & (1 << PIND5)) >> PIND5;