Hardware
Die Hardware ist zum großen Teil aus Holz.
Die 3D-Drucke stammen von TNT3Dprint.de.
Zahnriemenscheibe Azimut:
teeth = 120; // Number of teeth
profile = 12; //12=GT2_2mm
motor_shaft = 50.1; // NEMA17 motor shaft exact diameter = 5
m3_dia = 3.2; // 3mm hole diameter
m3_nut_hex = 1; // 1 for hex
m3_nut_flats = 5.7; // normal M3 hex nut exact width = 5.5
m3_nut_depth = 2.7; // normal M3 hex nut exact depth = 2.4
retainer = 1; // Belt retainer above teeth
retainer_ht = 1.5; // height of retainer flange over pulley
idler = 1; // Belt retainer below teeth
idler_ht = 1.5; // height of idler flange over pulley
pulley_t_ht = 8; // length of toothed part of pulley
pulley_b_ht = 8; // pulley base height
pulley_b_dia = 70; // pulley base diameter
no_of_nuts = 3; // number of captive nuts required
nut_angle = 120; // angle between nuts
nut_shaft_distance = 1.2; // distance between inner face of nut and shaft

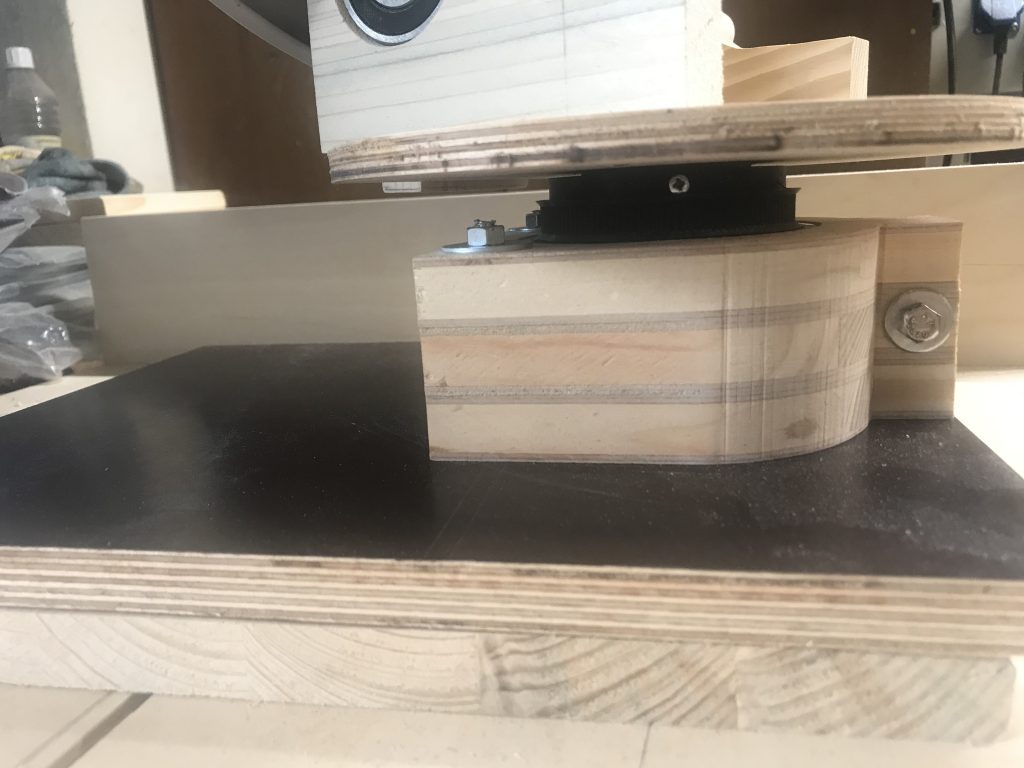
Lagerbock
Der Lagerbockbesteht aus drei aufeinandergeleimte Multiplexplatten. In diese wurde unten und oben ein Lager, Innendurchmesser 50mm eingesetzt.
Lager: 2 x Rillenkugellager 6010 2RS 50 x 80 x 16 mm
Azimut, Elevations- und Deklinnationswinkel
Azimutwinkel berechnen:
A = Azimutwinkel
gLE = geographische Länge des Empfangsort
gBE = geographische Breite des Empfangsort
gLS = geographische Länge der Satelittenposition
tan(gLE – gLS)
A = 180° + arctan ————–
sin gBE
Für Astra mit 19,2 Ost würde das z.B. so aussehen:
gLE = 8,7582988 (Längengrad für Knittlingen)
gBE = 49,0240107 (Breitengrad für Knittlingen)
gLS = 19,2
tan(8,7582988 – 19,2)
A = 180° + arctan ——————-
sin 49,0240107
Elevation berechnen:
GPS-Koordinaten für Knittingen:
49° 1′ 26.439″ N
8° 45′ 29.876″ E
http://www.fen-net.de/satellitentechnik-online/texte/orbit/azimut.htm
// Azimut und Elevation berechnen
void setup() {
double A; // Azimutwinkel
double E; // Elevationswinkel
// Daten für Stuttgart
String Ort = "Stuttgart";
float gLE = 9.2L; // Längengrad Stuttgart
float gBE = 48.8L; // Breitengrad Stuttgart
// Daten für Berlin
/*String Ort = "Berlin";
float gLE = 13.4L; // Längengrad Berlin
float gBE = 52.5L; // Breitengrad Berlin
*/
String Satellit = "Astra 19,2 Ost";
float gLS = 19.2L; // Längengrad Astra
//string Satellit = "Eutelsat F2 10,0 Ost";
//float gLS = 10.0L; // Längengrad Eutelsat F2
// Die Grademaße in Bogenmaße umrechnen
float L = 3.14/180 * gLE;
float B = 3.14/180 * gBE;
float P = 3.14/180 * gLS;
// Azimut in Gradmaß berechnen
A = 180 + 180/3.14 * atan (tan(L - P) / sin(B));
// Elevation im Gradmaß berechnen
E = 180/3.14 * atan (((cos(B) * cos(L - P)) -0.1513) / sqrt(1-sq(cos(B) * cos(L - P))));
// initialisiere die serielle Kommunikation mit 9600bps:
Serial.begin(9600);
// Ausgabe der berechneten Winkel
Serial.println ("Ort: " + Ort);
Serial.println ("Satellit: " + Satellit);
Serial.print ("Azimut = ");
Serial.print (A);
Serial.print (" Elevation = ");
Serial.println (E);
}RAMPS 1.4 zur Ansteuerung
Für die Ansteuerung der Schrittmotoren wird ein RAMPS 1.4 – Shield verwendet. Folgende Anschlüsse werden verwendet
Azimut
E0 = Anschluss für den Schrittmotor „Azimut“
X_MIN = Endschalter Azimut MIN
X_MAX = Endschalter Azimut MAX
Elevation
E1 = Anschluss für den Schrittmotor „Elevation“
Y_MIN = Endschalter Elevation MIN
Y_MAX = Endschalter Elevation MAX
Kompasssensor am RAMPS 1.4
Der Kompassensor so wie eventuell weitere Sensoren werden über den I2C-Bus am RAMPS 1.4 angeschlossen
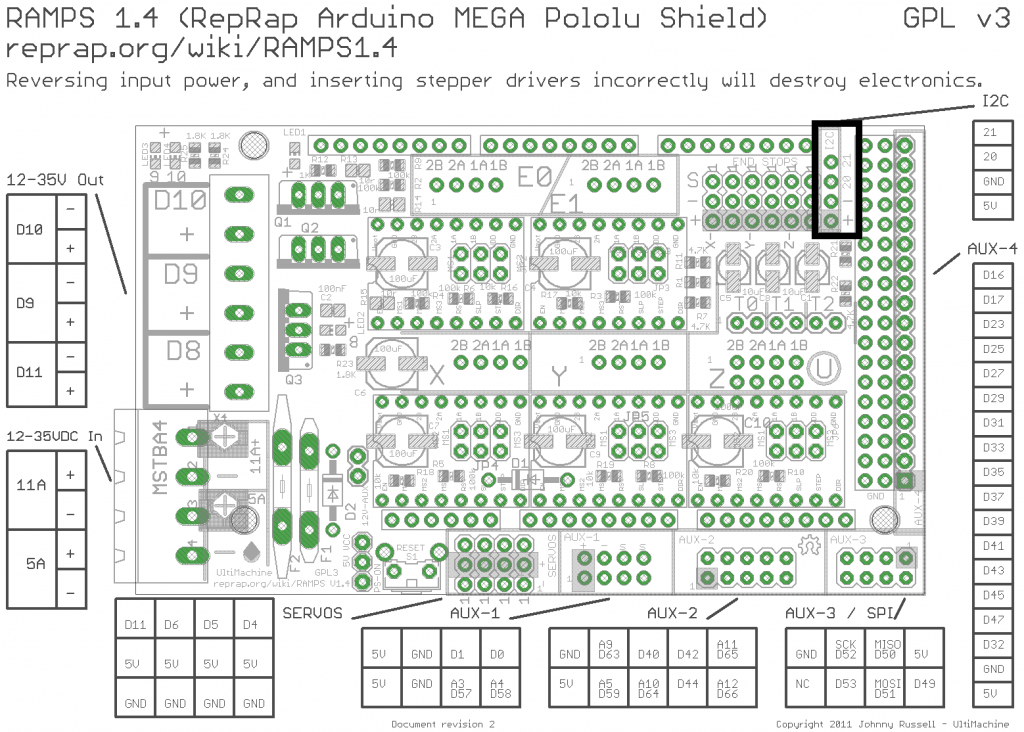
5V = rot
GND = schwarz
20 = blau
21 = grün