Die Wire-Bibliothek ermöglicht dem Arduino, mit Geräten zu kommunizieren, die das I²C-Protokoll verwenden. Der Vorteil gegenüber der Kommunikation über die serielle Schnittstelle ist, dass über den I²C-Bus mehr als zwei Geräte miteinander kommunizieren können.
Selbstverständlich kann man nicht nur spezielle I²C-Geräte, sondern auch mehrere Arduinos an den I²C-Bus anschließen. Jedes am Bus angeschlossene Gerät erhält eine eigene Adresse. Da die Adresse 7 Bit breit ist, können bis zu 112 Geräte an einen I²C-Bus angeschlossen werden (16 der 128 möglichen Adressen sind für Sonderzwecke reserviert).
Der I²C-Bus ist eine Entwicklung von Philips (heute NXP Semiconductors). Wer mehr darüber wissen möchte, sollte sich den entsprechenden Eintrag in der Wikipedia ansehen.
Ab und zu wird der I²C-Bus als Two-Wire-Interface oder TWI bezeichnet.
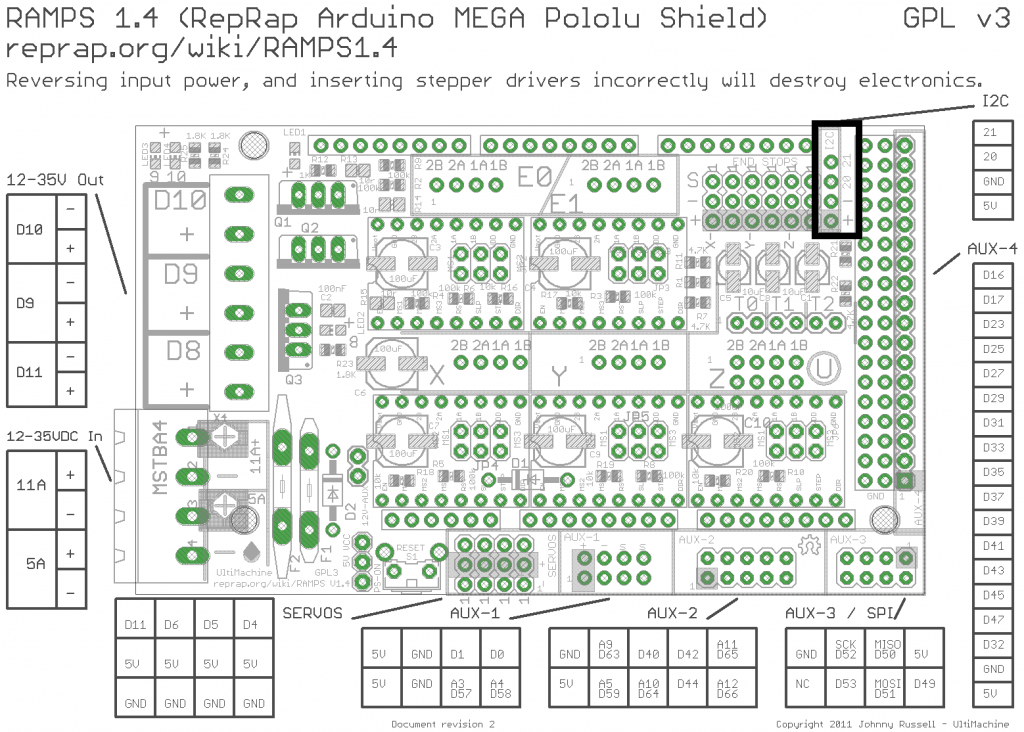
Ein I²C-Bus benötigt zwei Leitungen: SCL für ein Taktsignal und SDA für Daten. Da ältere Arduinos für diese beiden Leitungen keine separaten Anschlüsse haben, verwendet man bei diesen Boards die Leitungen A4=SDA und A5=SCL
Der Schaltplan eines aktuellen Arduinos zeigt, dass SDA- und SCL-Anschluss weitergeführte A4- bzw. A5-Anschlüsse sind.
Wenn ein Arduino an einen I²C-Bus angeschlossen ist, stehen die analogen Eingänge A4 und A5 nicht mehr für andere Dinge zur Verfügung.
Die Busleitungen müssen mit Pull-up-Widerständen ausgestattet werden.
Um diese Bibliothek in eigenem Code zu verwenden, muss sie mittels
#include <Wire.h>
eingebunden werden.
Die Wire-Bibliothek stellt folgende Befehle zur Verfügung:
begin()
Beschreibung
Initialisiert die Bibliothek und meldet den Arduino mit der angegebenen Adresse am I²C-Bus an. Soll der Arduino als Busmaster angemeldet werden, entfällt die Adresse.
Syntax
Wire.begin()
Wire.begin(Adresse)
Parameter
Adresse = the 7-bit slave address (optional); if not specified, join the bus as a master.
Rückgabe
keine
requestFrom()
Beschreibung
Fordert vom angegebenen Gerät die angegebene Anzahl von Bytes an. Der dritte (optionale) Parameter gibt an, ob der I²C-Bus nach dem Senden der Anforderung wieder freigegeben wird: true (default) bedeutet, dass der Bus wieder freigegeben wird, false sorgt dafür, dass der Bus „besetzt“ bleibt. Sinnvoll ist zweiteres dann, wenn man mehrfach Daten abfragen und verhindern möchte, dass ein anderer Busteilnehmer „dazwischenfunkt“.
Syntax
Wire.requestFrom(address, quantity)
Wire.requestFrom(address, quantity, stop)
Parameter
address: the 7-bit address of the device to request bytes from
quantity: the number of bytes to request
stop : boolean. true will send a stop message after the request, releasing the bus. false will continually send a restart after the request, keeping the connection active.
Rückgabe
byte : the number of bytes returned from the slave device
beginTransmission()
Beschreibung
Bereitet eine Datenübertragung an das Gerät mit der angegebenen Adresse vor. Anschließend werden die zu übertragenden Daten mit einem oder mehreren Wire.write()-Befehl(en) in einen Puffer geschrieben. Mit dem Aufruf von Wire.endTransmission() werden die Daten übertragen.
Syntax
Wire.beginTransmission(address)
Parameter
address: the 7-bit address of the device to transmit to
Rückgabe
Keine
endTransmission()
Beschreibung
Überträgt die gepufferten Daten an das mit Wire.beginTransmission() angegebene Gerät.
Syntax
Wire.endTransmission()
Wire.endTransmission(stop)
Parameter
stop : boolean. true will send a stop message, releasing the bus after transmission. false will send a restart, keeping the connection active.
Rückgabe
byte, which indicates the status of the transmission:
0 : success
1 : data too long to fit in transmit buffer
2 : received NACK on transmit of address
3 : received NACK on transmit of data
4 : other error
write()
Beschreibung:
Mit diesem Befehl befüllt man den Sendepuffer mit den Dingen, die beim Aufruf von Wire.endTransmittion() gesendet werden sollen.
Syntax:
Wire.write(value)
Wire.write(string)
Wire.write(data, length)
Parameter:
value: a value to send as a single byte
string: a string to send as a series of bytes
data: an array of data to send as bytes
length: the number of bytes to transmit
Rückgabe:
byte: write() will return the number of bytes written, though reading that number is optional
Beispiele:
Wire.write(5); // schreibt die Zahl 5 in den Puffer.
Wire.write(„Hallo“); // schreibt „Hallo“ in den Puffer.
available()
Beschreibung;
Gibt die Anzahl der Bytes zurück, die sich im Empfangspuffer befinden. Man kann diesen Befehl zum Beispiel im Kopf einer while-Schleife benutzen. Die Schleife wird dann durchlaufen, so lange sich etwas im Empfangspuffer befindet.
Syntax:
Wire.available()
Parameter:
Rückgabe:
Beispiel:
while(Wire.available())
{ Serial.print(Wire.read()); }
read()
Beschreibung
Liest ein Zeichen aus dem Empfangspuffer
Syntax:
Wire.read()
Parameter:
keine
Rückgabe:
Gibt das empfangene Byte zurück.
Beispiel:
Siehe das Beispiel bei Wire.available().
SetClock()
Beschreibung:
Syntax:
Parameter:
Rückgabe:
Beispiel:
onReceive()
Wire.onReceive(Funktion)
Beschreibung
Bestimmt die angegebene Funktion als diejenige Funktion, die aufgerufen wird, wenn Daten über den I²C-Bus empfangen wurden. Die Funktionsdefinition kann einen Parameter enthalten, mit dem die Zahl der eingetroffenen Bytes übergeben werden kann.
Syntax
Parameter
Rückgabe
Beispiel:
Wire.onReceive(I2C_receive);
Die Definition dieser Funktion beginnt dann beispielsweise mit void I2C_receive(int num_bytes) {…
Achtung:
Der Typ des Parameters der Funktion muss int sein, sonst gibt es beim Compilieren eine Fehlermeldung.
onRequest()
Wire.onRequest(Funktion)
Beschreibung:
Bestimmt die angegebene Funktion als diejenige Funktion, die aufgerufen wird, wenn Daten angefordert werden (siehe Wire.requestFrom()). Diese Funktion erhält keine Daten und gibt auch nichts zurück.
Syntax:
Parameter:
Rückgabe:
Beispiel:
Wire.onRequest(requestHandler);
Die Definition dieser Funktion sieht dann beispielsweise so aus:
void requesthandler() {…}