Den Honig im Wasserbad langsam erwärmen. Wichtig, nicht über 40°C.
Die 6 Liter Wasser erwärmen, auch nicht über 40°C. Wenn das Wasser warm ist, den Honig einrühren. Den Ansatz rühren bis sich der Honig vollständig aufgelöst hat. Die Flüssigkeit bis auf ca 25°C abkühlen lassen. Nun Hefe und Nährsalz nach Herstellerangaben zugeben.
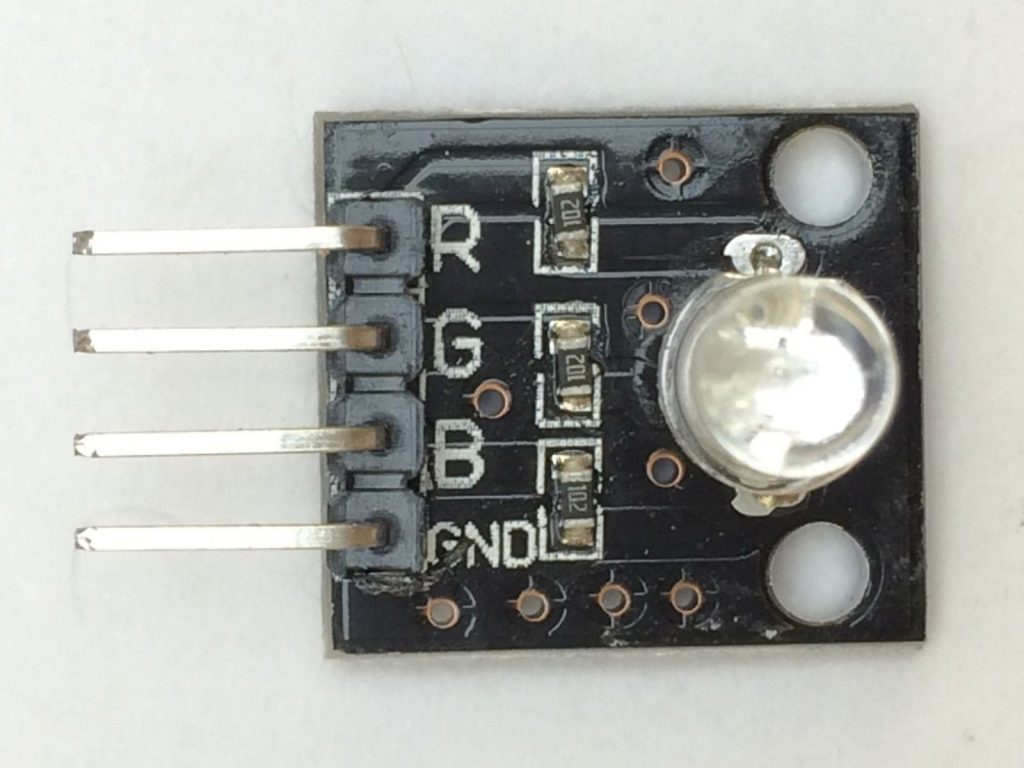
Vorwiderstände (102) mit 1kOhm sind auf dem Modul schon vorhanden.
Pinbelegung: R = Rot G = Grün B = Blau GND = Masse
// RGB LED-Modul
// Die vorhandenen Farben schalten
int BLAU = 13;
int GRUEN = 12;
int ROT = 11;
void setup() {
pinMode(BLAU, OUTPUT); // Port als Ausgang und als BLAU festlegen
pinMode(GRUEN, OUTPUT); // Port als Ausgang und als GRUEN festlegen
pinMode(ROT, OUTPUT); // Port als Ausgang und als ROT festlegen
}
void loop() {
digitalWrite(BLAU, HIGH); // Blau wird high geschaltet
delay(500); // warten
digitalWrite(BLAU, LOW); // Blau wird high geschaltet
digitalWrite(GRUEN, HIGH); // Gruen wird high geschaltet
delay(500); // warten
digitalWrite(GRUEN, LOW); // Gruen wird low geschaltet
digitalWrite(ROT, HIGH); // ROT wird high geschaltet
delay(500); // warten
digitalWrite(ROT, LOW); // ROT wird low geschaltet
}
retainer = 1; // Belt retainer above teeth retainer_ht = 1.5; // height of retainer flange over pulley idler = 1; // Belt retainer below teeth idler_ht = 1.5; // height of idler flange over pulley
pulley_t_ht = 8; // length of toothed part of pulley pulley_b_ht = 8; // pulley base height pulley_b_dia = 70; // pulley base diameter no_of_nuts = 3; // number of captive nuts required nut_angle = 120; // angle between nuts nut_shaft_distance = 1.2; // distance between inner face of nut and shaft
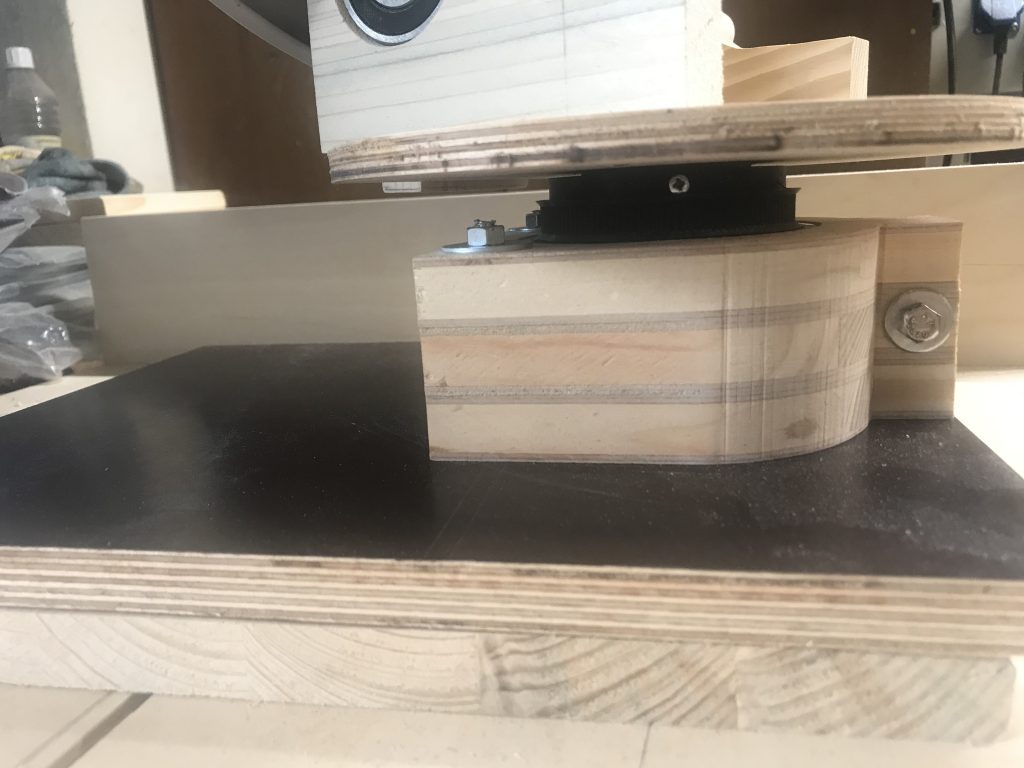
Lagerbock
Der Lagerbockbesteht aus drei aufeinandergeleimte Multiplexplatten. In diese wurde unten und oben ein Lager, Innendurchmesser 50mm eingesetzt.
Lager: 2 x Rillenkugellager 6010 2RS 50 x 80 x 16 mm
Lagerbock mit Zahnriemenscheibe 120Zähne
Azimut, Elevations- und Deklinnationswinkel
Azimutwinkel berechnen: A = Azimutwinkel gLE = geographische Länge des Empfangsort gBE = geographische Breite des Empfangsort gLS = geographische Länge der Satelittenposition
tan(gLE – gLS) A = 180° + arctan ————– sin gBE
Für Astra mit 19,2 Ost würde das z.B. so aussehen: gLE = 8,7582988 (Längengrad für Knittlingen) gBE = 49,0240107 (Breitengrad für Knittlingen) gLS = 19,2
tan(8,7582988 – 19,2) A = 180° + arctan ——————- sin 49,0240107
Elevation berechnen:
GPS-Koordinaten für Knittingen: 49° 1′ 26.439″ N 8° 45′ 29.876″ E
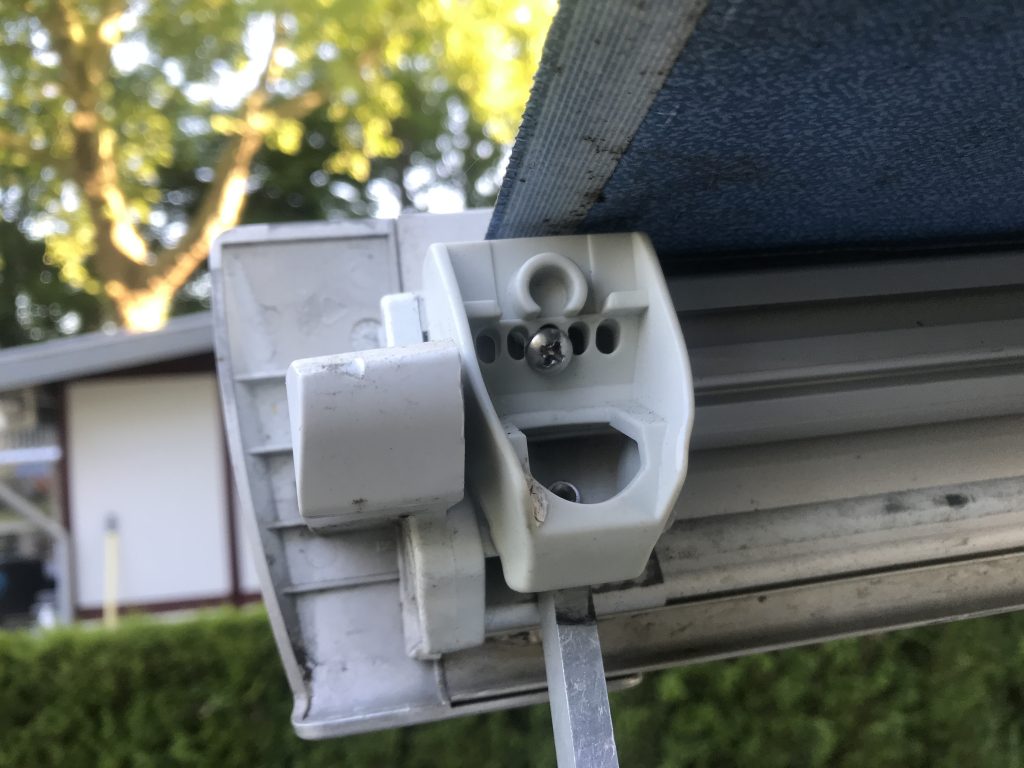
An der Markise sind seitlich Halterungen, um Seitenwände einzuhängen, angebracht. Hierzu wird eine Spannstange zwischen Markiesengehäuse und Frontprofil eingehängt. in diese Spannstange kann dann ein Sonnen-, Sicht- oder Regenschutz eingehängt werden.
Auch am Frontprofil kann ein Sonnen- Sicht- oder Regenschutz in die vorhandene Nut eingeschoben werden.
Das Zubehör fehlt uns komplett.
Diese Teile sollten als Sonnenschutz an der Markise passen. – Thule Sun Blocker G2 Side (2.50 m – Medium) – Thule Sun Blocker G2 Front 2.80 m
Im Wohnmobil ist ein Thetford N90 Kühlschrank mit Premium-LCD verbaut.
Das Display zeigt über die blaue LED den Betriebszustand des Kühlschranks an. So lange die LED dauerhaft leuchtet ist alles in bester Ordnung. Blinkt die blaue LED liegt ein Fehler, der über einen Fehlercode im Display angezeigt wird, vor. Die Fehlercodes und die entsprechende Bedeutung und Behebung werden In der Gebrauchsanleitung beschrieben.