Produktname: Mikroschalter; Modell Nr .: V-156-1C25; Betaetigertyp: Langer Scharnierhebel Bewertung: 15A 250VAC; Leistung: 15A 1 / 2HP 125 250VAC0.6A 125VAC 0.3A 250VAC; Kontakt Typ: SPDT 1NO 1NC Rollen groesse: 5 x 4,3 mm / 0,2 Zoll x 0,17 Zoll (D * H); Befestigungsloecher Durchmesser: 0.33cm / 0.13 Zoll; Betaetiger groesse: 2.9 x 0.45cm / 1.1Zoll x 0.18 Zoll(L * W) Gesamtgroesse: 5 x 3 x 1cm / 2 Zoll x 1,2 Zoll x 0,39 Zoll(L * W * T) Material: Kunststoff & Metall, Farbe: Rot, Schwarz Nettogewicht: 69g Anschluß: Flachstecker 4,8mm
Zum Anschliesen der Schalter werden Falchsteckhülsen 4,8mm benötigt. Endschalter mit Schraubanschluß sind besser zu verarbeiten.
Kleine Endschalter
Die Anschlüsse: Pin 1 = COM = Signal (grau, gelb, weis …) Pin 2 = NC = +5V (rot) Pin 3 = NO = GND (schwarz) Die Anschlussleitung habe ich ca. 10cm lang gemacht, am Endschalter angelötet und auf der anderen Seite ein Dupont-Stecker angebracht.
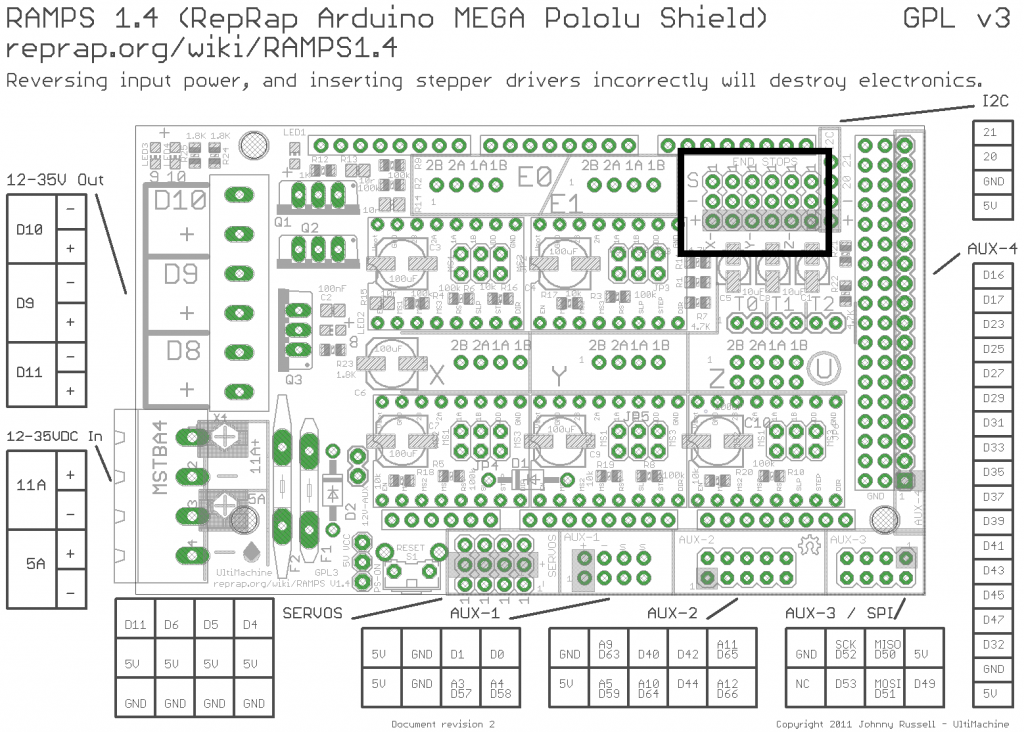
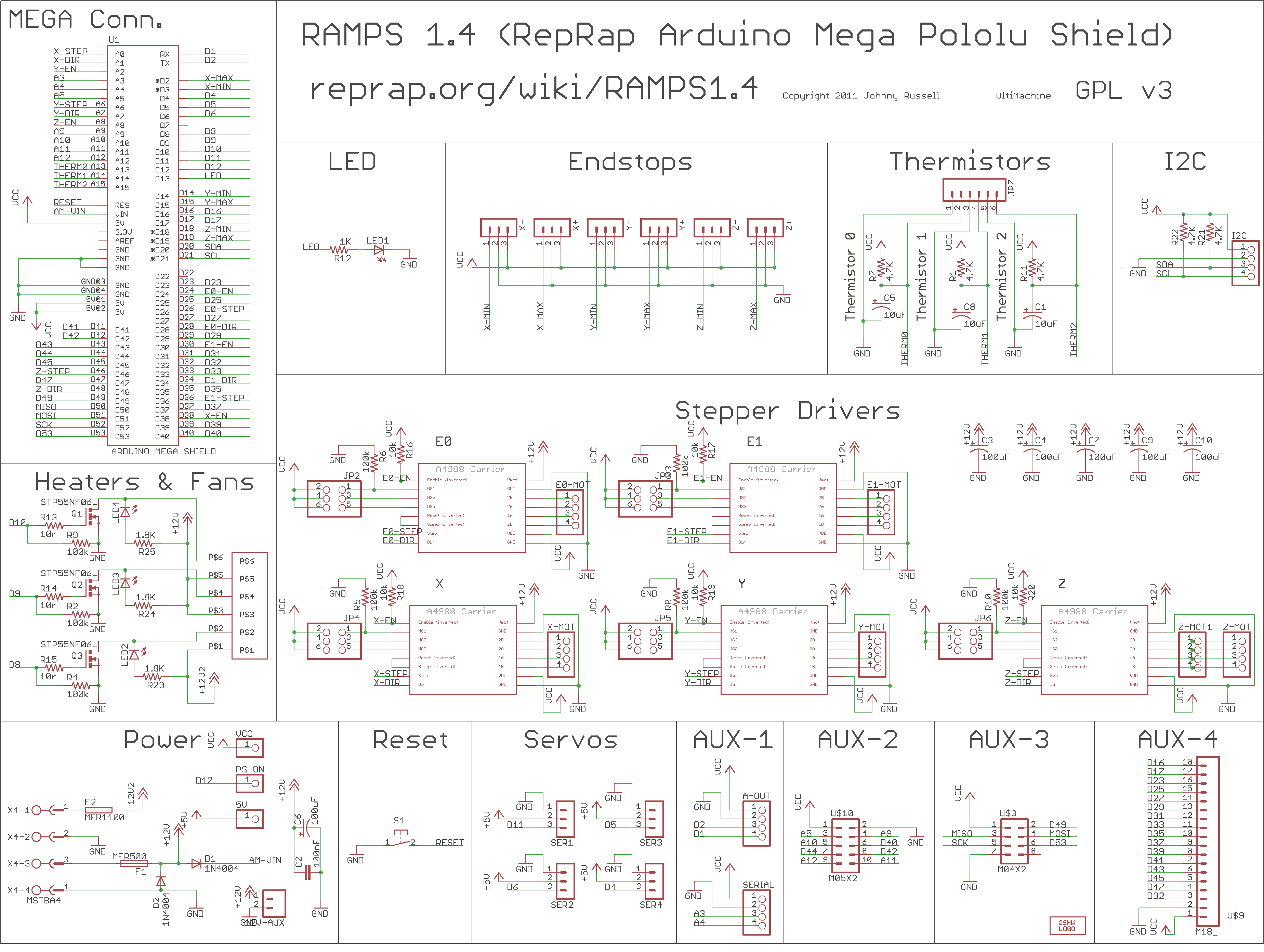
RAMPS 1.4 – Anschlussplan Anschlussplan Ramps 1.4 6 x Anschluss für Schrittmotoren, X-, Y- und 2 x Z-Achse, 2 x Extruder
3 x Anschluss für Temperatursensoren, Heizplatte und 2 x Extruder
Anschluss für Heizbett
2 x Anschluss für HotEnd, Bauteilkühllüfter
Anschluss für diverse LCD-Display (Adapter erforderlich)
6 Anschlüsse für Min- und Max X-Y-Z-Endstops
Schaltplan RAMPS 1.4
an den Anschlüssen des RAMPS habe ich folgendes aufgelegt:
D8 = Heizbett
D9 = Lüfter Extruder D10 = Extruder
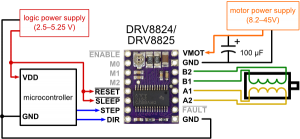
Schrittmotortreiber DRV8825 von Texas Instrumets Hersteller: Pololu
einstellbare Strombegrenzung,
Überstrom- und Übertemperaturschutz
sechs Mikroschritt-Auflösungen: Vollschritt, Halbschritt, 1/4-Schritt, 1/8-Schritt, 1/16-Schritt und 1/32-Schritt arbeitet von 8,2 V bis 45 V
1,5 A pro Phase ohne Kühlkörpe (bis zu 2,2 A pro Spule mit ausreichender zusätzlicher Kühlung). Schalt- und Belegungsplan:

 Mounted ball bearing:
Mounted ball bearing: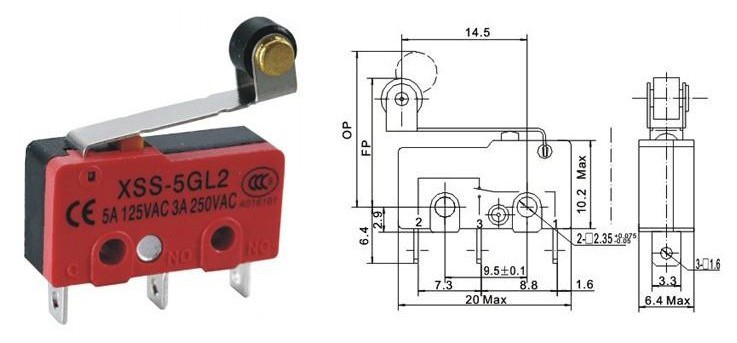
 Ich hab mir eine Bosch PTS 10 Tischkreissäge gekauft. Scheint mir für meine Ansprüche die richtige Maschine zu sein.
Ich hab mir eine Bosch PTS 10 Tischkreissäge gekauft. Scheint mir für meine Ansprüche die richtige Maschine zu sein.




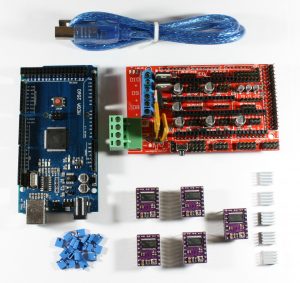 Zu Steuerung meines 3D-Druckers habe ich folgende Teile bestellt:
Zu Steuerung meines 3D-Druckers habe ich folgende Teile bestellt: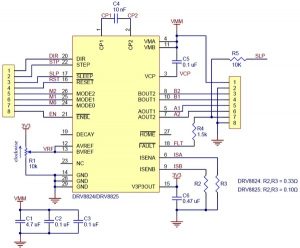
 Antriebe:
Antriebe: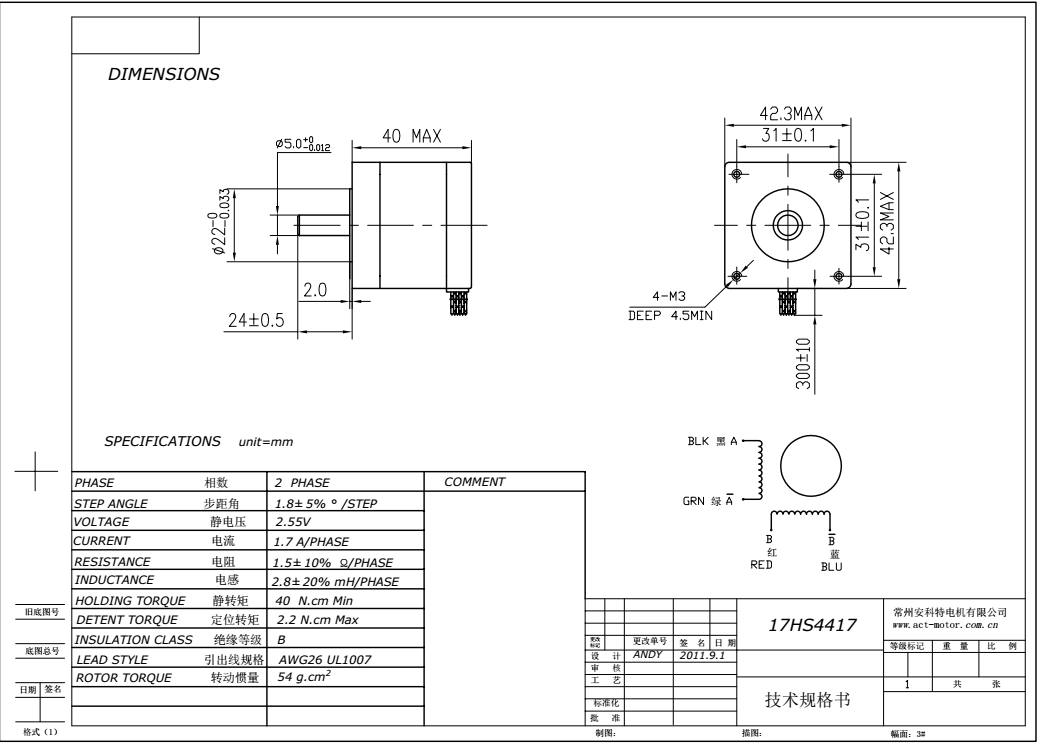
{kind=link}