03. bis 12.09.2021

Mit dem Womo in Südfrankreich.

Cannes

Nice

Monte-Carlo
Lago-Maggiore
Bodensee
Rheinfall
Mein Online – Notizbuch / Gehirn
03. bis 12.09.2021
Mit dem Womo in Südfrankreich.
Cannes
Nice
Monte-Carlo
Lago-Maggiore
Bodensee
Rheinfall
Auf dem Campingplatz in Port Grimaud habe ich folgenden Stuhl gesehen. Zu dem Stuhl sind im Internet verschiedenen Bauanleitungen unter dem Begriff „Schwedenstuhl“ zu finden.





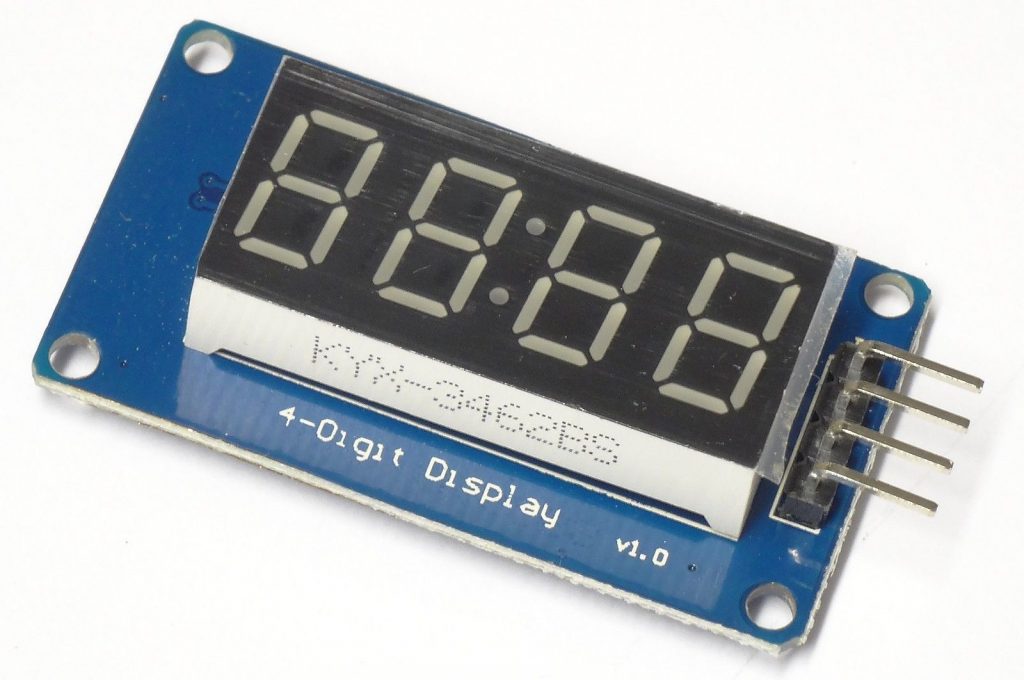
Anzeige Modul TM1637
Betriebsspannung: 3,3V / 5V
Strom 30-80mA
Beleuchtung in rot
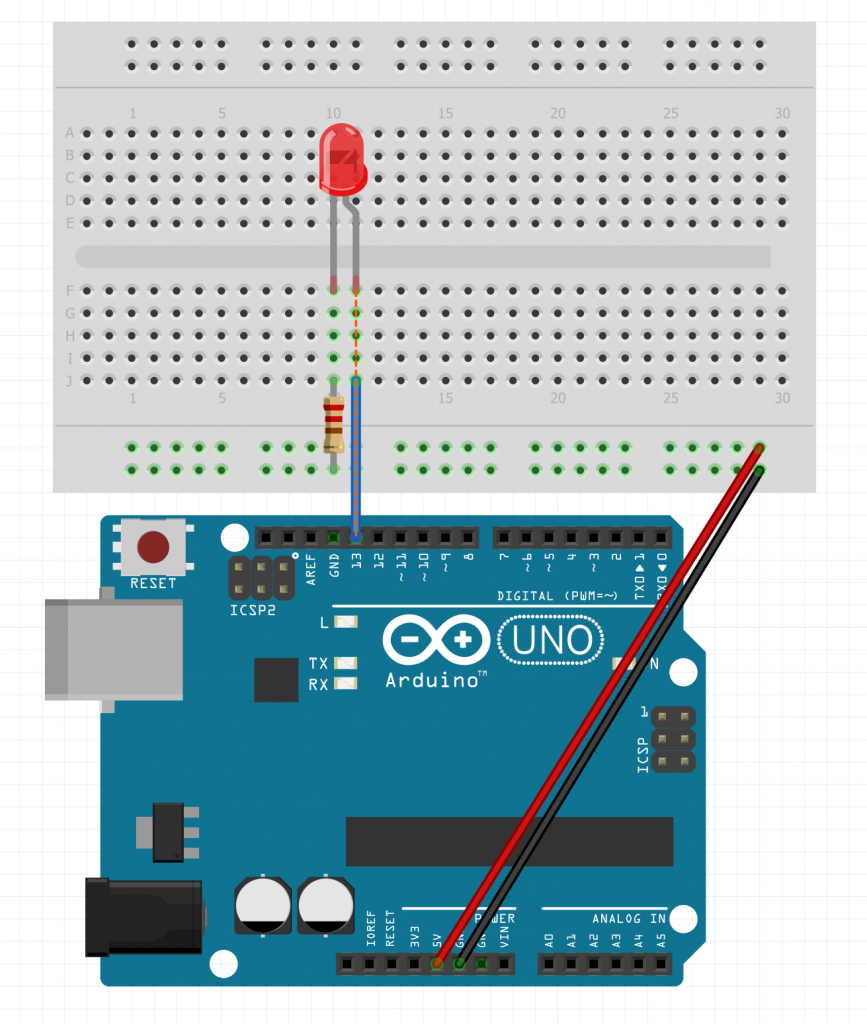
// blinkende LED
// Eine Leuchtdiode wird eine Sekunde an, und dann wieder eine Sekunde ausgeschaltet. Dieser Vorgang wird endlos wiederholt.
void setup() {
pinMode(13, OUTPUT); // Port 13 wird als Ausgang festgelegt
}
void loop() {
digitalWrite(13, HIGH); // Port 13 wird high geschaltet
delay(1000); // eine Sekunde warten
digitalWrite(13, LOW); // Port 13 wird low geschaltet
delay(1000); // eine Sekunde warten
}Aufgabe:
Ein Programm, z.B. der CGMiner, soll beim hochfahren automatisch gestartet werden.

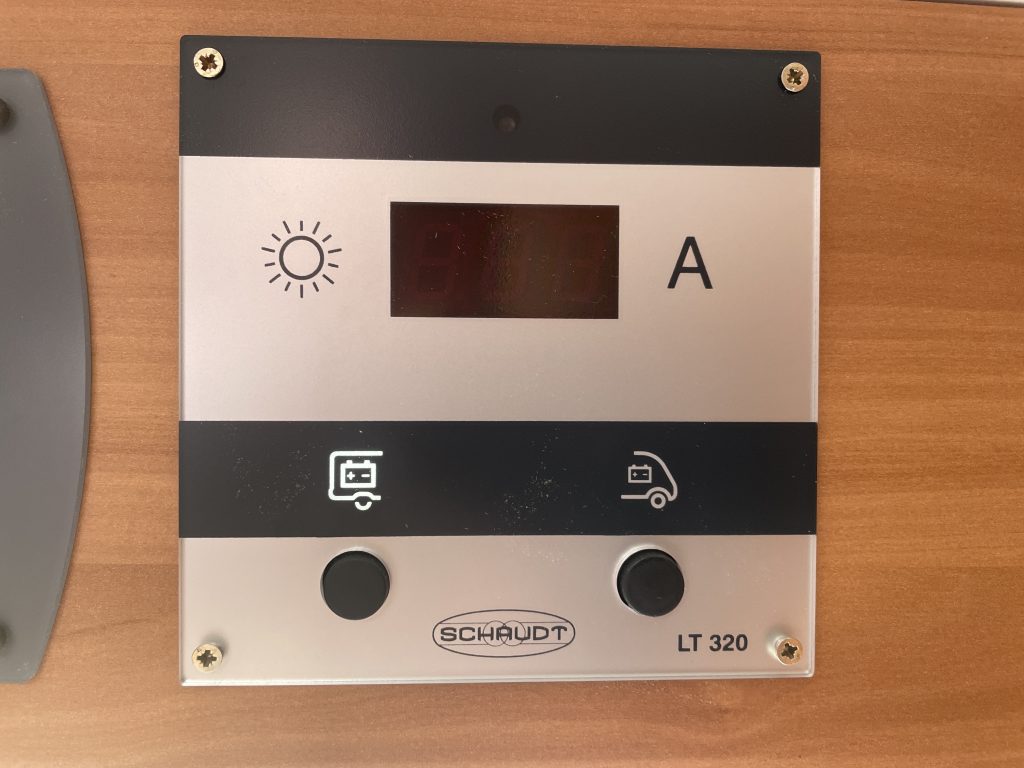
D+ Verstärker DP02 von Schaudt.

Warmes Wasser und geheizt wird mit Gas. Zum Betrieb muss eine Gasflasche angeschlossen und geöffnet sein. Weiter miss die Wohnraumsteuerung eingeschaltet sein.
Der Heizungsregler ist direkt über der Eingangstüre zum Wohnraum.

O = Aus
40 = Warmwasserbereitung 40 Grad
60 = Warmwasserbereitung 60 Grad
Flamme = Heizung
Flamme & 60 = Heizung und Warmwasser 60 Grad
Truma Elasi 12V
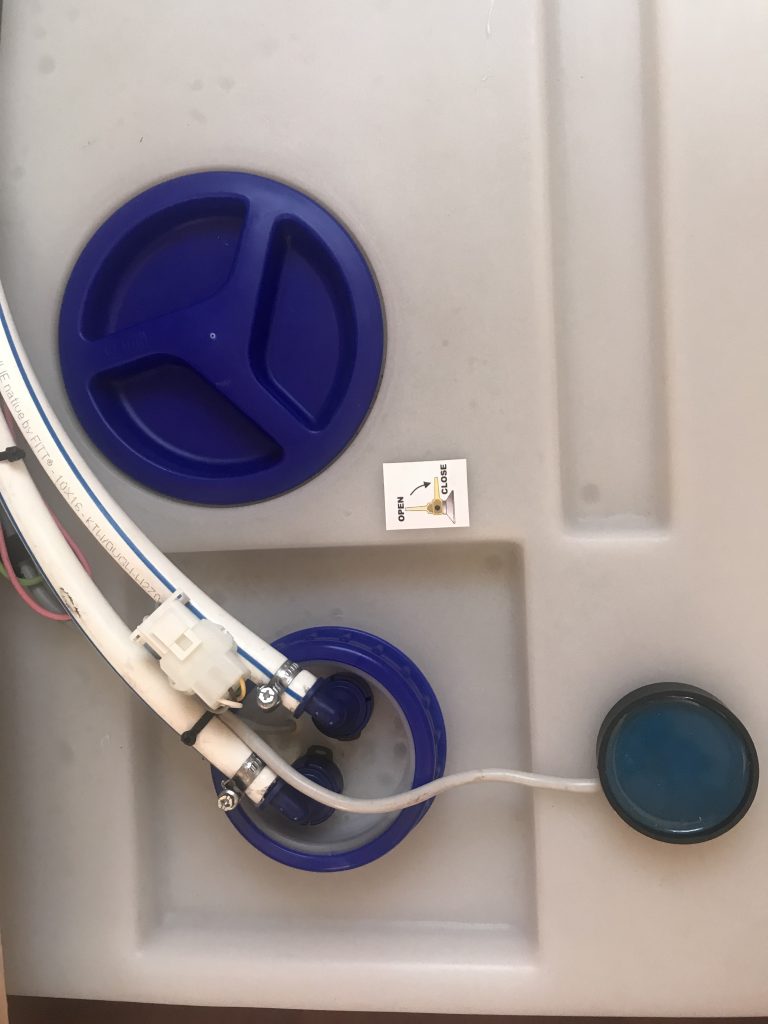
Das elektrische Frostschutzventil ist direkt beim Boiler im linken Heck montiert. Das Ventli läst den Wasserinhalt der Anlage unter einer Aussentemperatur von 8 Grad, wenn die Heizung nicht eingeschaltet ist, ab.

roter Stift oben = Wasser wird gehalten
roter Stift unten = Wasser wird abgelassen
Der Frischwassertank ist in der großen Sitzbank verbaut.

Aktuell ist ein Ford 6000 CD in unserem Womo verbaut. Diesen möchte ich durch ein modernes Radio mit Touchscreen und Navi ersetzen.

Um das Radio ausbauen zu können wird spezielles Demontagewerkzeug benötigt. Dieses Werkzeug habe ich schon vorab besorgt liegt bei mir aber auch dem neuen Radio bei.

Die Blende am Einbauschacht muss vermutlich ausgebaut werden. Ob das neue Radio dann eine andere Blende benötigt oder den Schacht abdeckt ist noch unklar.

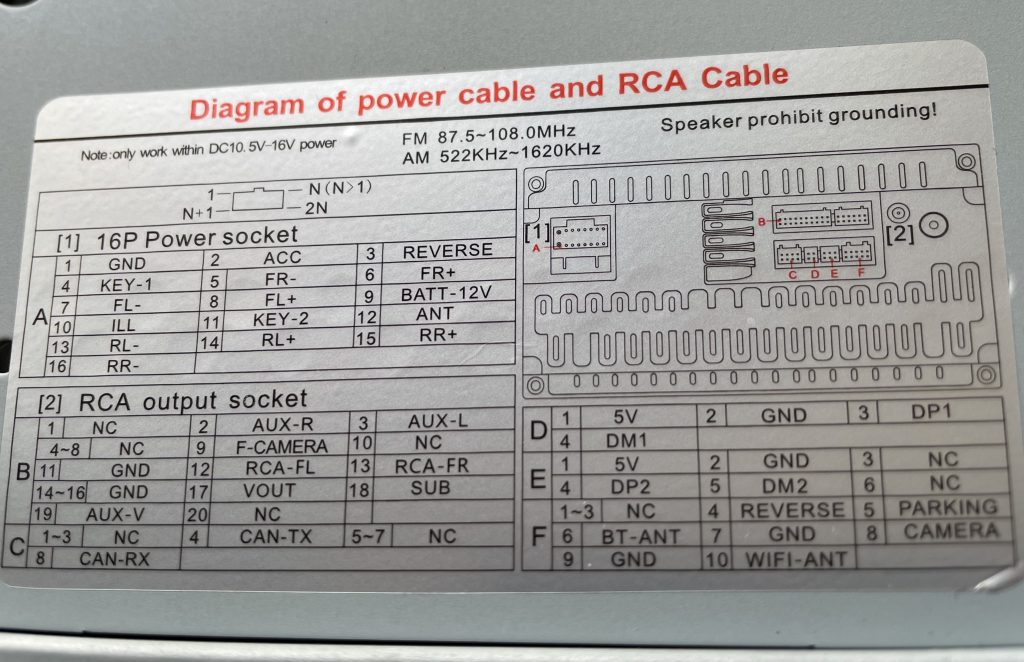
Der Steckverbinder ist unter der Bezeichnung Quadlock zu finden.
http://www.die-hailers.de/mk4-wiki/Quadlock-Stecker.htm
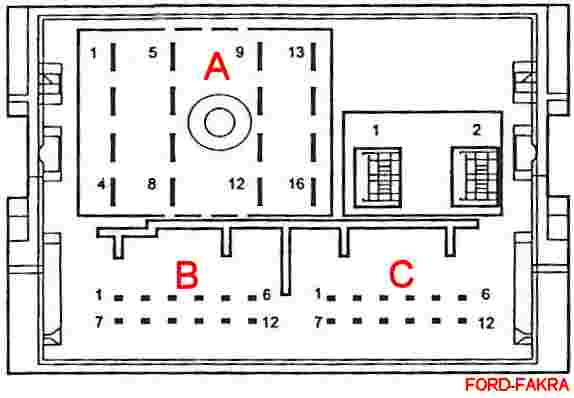

A 1 bis 8: Lautsprecher
1 Lautsprecher hinten rechts +
2 Lautsprecher vorne rechts +
3 Lautsprecher vorne links +
4 Lautsprecher hinten links+
5 LS HR –
6 LS VR –
7 LS VL –
8 LS HL –
A 9 bis 16: Versorgung
9 CAN-Bus High
10 CAN-Bus Low
11 GND Keycode / Signal Masse
12 Masse
13 Alarm / Dienstahlwarnsensor
14 Licht / Beleuchtung
15 Batterie + / Versorgungsspannung
16 Zündung +
B:
1 Mono +
2 SW A+ / Remote z.B. CD-Wechsler eingeschaltet
3 AUX1 links + (z.B. CD-Wechsler)
4 AUX1 rechts + (z.B. CD-Wechsler)
5 Telelefon Mute
6 SWC (analoge Lenkradfernbedienung -> CAN)
7 Mono –
8 Masse SWC -> CAN
9 AUX1 links –
10 AUX1 rechts –
11 Rückwärtsgang eingelegt -> CAN
12 AVC (GALA) / Geschwindigkeitssignal -> CAN
C:
1 Fernbedienung Fond L+
2 Fernbedienung Fond R+
3 Mono 2+
4 Subwoofer+
5 AUX2 L *
6 Masse *
7 Fernbedienung Fond L-
8 Fernbedienung Fond R-
9 Mono 2-
10 Subwoofer-
11 AUX2 R*
12 frei (Masse?)
* bei einigen Fahrzeugen liegt Stecker bereits im Handschuhfach
D: ?
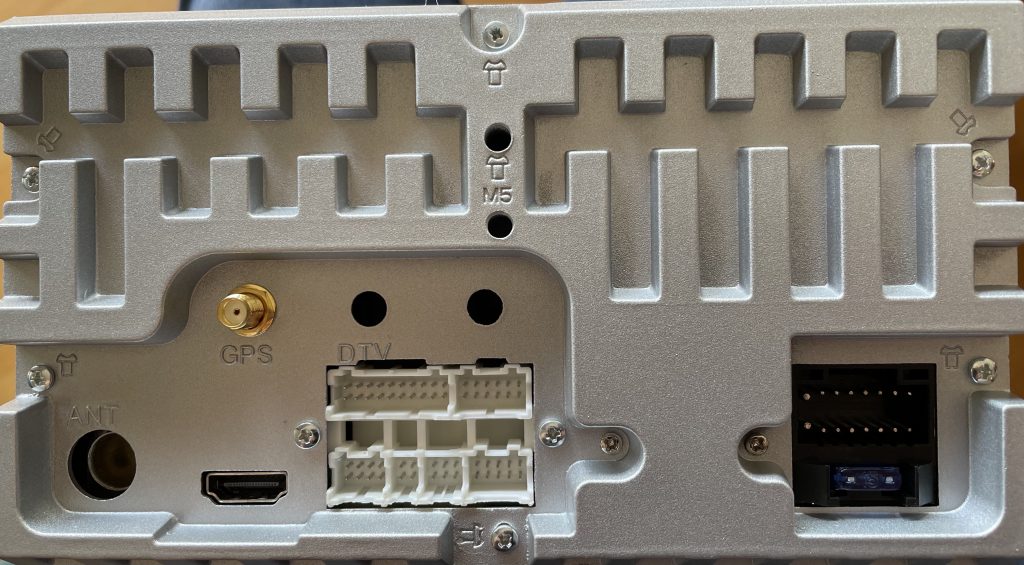
Das neue ist da.
Bosion BX-A900
4GB RAM (DDR3)
64GB ROM
Android 10.0
PX6 Cortex 3399 Core 2.0GHz
BT 5.0
Doppel DIN
Radio-Chip NXP7851 + RDS Support
Power AMP IC TDA7388
Decoding IC SPHE8202VGQ
Auflösung 1026×600

Der mitgelieferte CAN-Bus Decoder FD-SS-01A von SimpleSoft ist leider nicht vollständig für unser Womo geeignet. Ein Teil der digitalen Informationen aus dem Bus werden nicht richtig interprediert und in analoge Signale umgesetzt.
Das ACC Signal steht z.B. dauerhaft an. Somit wird das Radio nicht mit der Zündung eingeschaltet.
Von SimpleSoft habe ich folgende Decoder gefunden. Ob davon einer besser geeignet ist konnte ich nicht herausfinden.
FD-SS-01
Für Mondeo(4th gen.)
Focus(2nd gen.)
2010Galaxy
S-Max
2012 Mondeo
FD-SS-01A
20 Pin
FD-SS-02
Für Ford Explorer/Edge/Expedition/Mustang/Lincoln
FD-SS-05
FD-SS-05A
Für 2017 Kuga 2015 Tourneo Custom 2015 Fokus 2013 C-Max
FD-SS-06A
2013-2019 Ford SUV & Lkw Fahrzeuge 2018-up Ecosport Fiesta
16 Pin
FD-SS-09
FÜR 2009 Fiesta(6th gen.)
FD-SS-12
Für 2010-2015 FORD Ranger & Everest
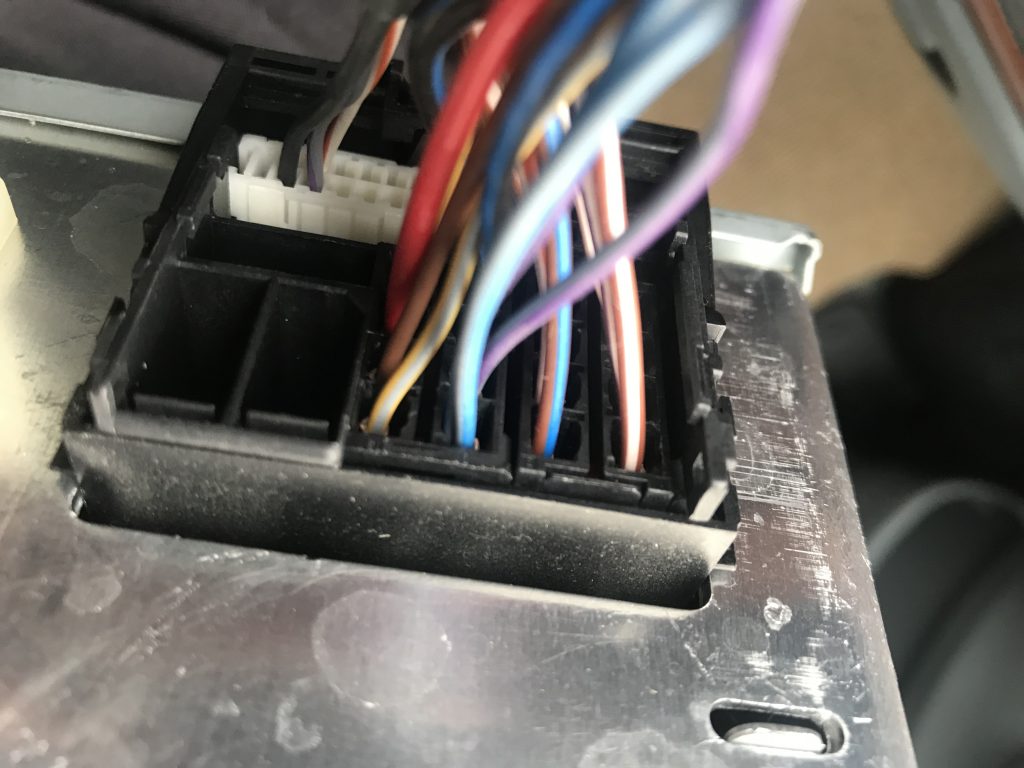
Am Decoder ist ein 20-poliger Stecker vorhanden. Über diesen werden die Analogen Signale zur Verfügung gestellt.
Die Steckerbelegung vom CAN-Bus Decoder ist folgende:
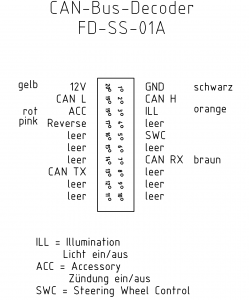
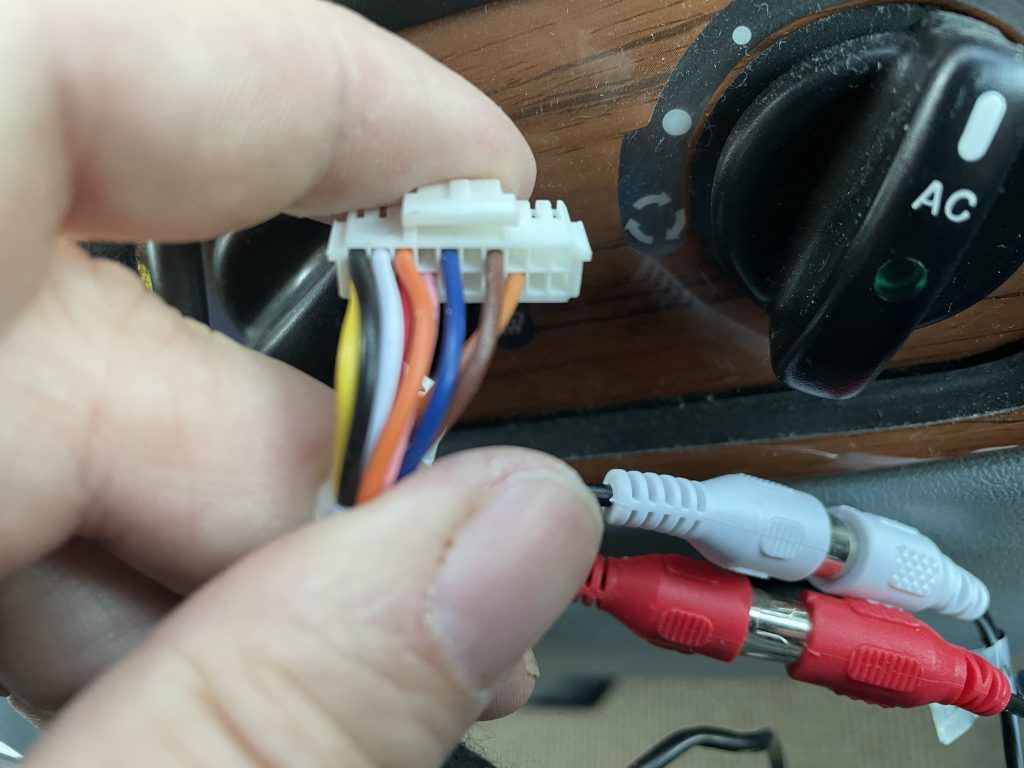
Da auf dem Quadlock-Stecker vom alten Radio die Signale ACC und ILL als Hardwaresignale vorhanden waren. habe ich diese aus dem Decoder ausgeklemmt.
CAN L und CAN H sind der CAN-Bus vom Fahrzeug, CAN RX und TX sind der CAN-Bus vom Radio
Ist bereits im gekauften Paket enthalten. Da es sich jedoch um eine relativ einfache Kamera handelt, werde ich diese vorerst nicht anbauen. Im Internet habe ich Funkkameras gefunden die in der Nummernschildhalterung integriert sind. Diese werd ich mir mal näher anschauen.
Das Radio hat ein eingebautes Mikrofon. Ob ein externes benötigt wird werde ich später entscheiden.
Nach dem das Radio nun eingebaut ist konnte ich das interne Mikro testen. Hier habe ich festgestellt, dass die Sprachqualität gut ist und vorerst kein externes Mikro nötig ist.

Um mit dem neuen Radio an die Fahrzeugdaten zu kommen, habe ich noch einen CAN-Bus OBD2-Adapter bestellt.
Ob ein DAB+ Adapter erforderlich ist, werde ich erst entscheiden wenn das Radio eingebaut ist. AM/FM Radio ist auch ohne DAB+ möglich.
Mal schauen ob man so einen Dongel benötigt. Mit Dongle hätte man im Womo über W-LAN halt Internet …
Im Womo ist ein Thetford C250 WC verbaut.
Offensichtlich gibt es ein SOG verbaut.
Der Abwasser- / Fäkalientank hat ein Volumen von 18 Liter.


Wir verwenden:
Thetford Aqua Kem Blue Sachets
25g Beutel für einen frischen und leicht zu entleerenden Fäkalientank.