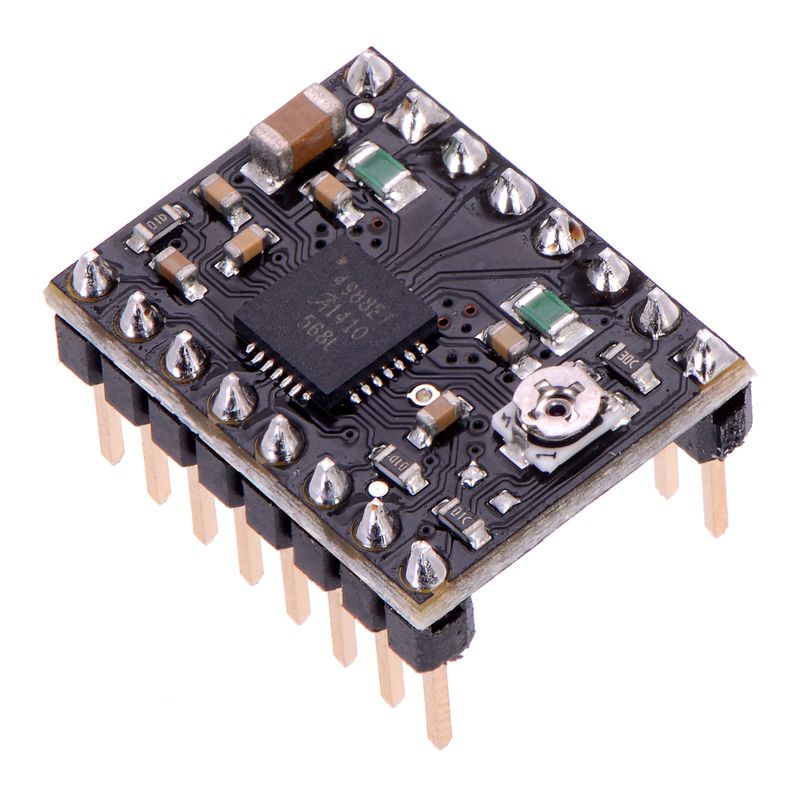
2A = 0,8Vref bei 0,05Ohm Rsens
Mein Online – Notizbuch / Gehirn
2A = 0,8Vref bei 0,05Ohm Rsens
GND = Masse
DIR = Drehrichtung
STEP = SchrittSLEEP =RESET =
M2 =
M1 =
M0 =ENABLE =FAULT =
A2 = Motorwicklung A
A1 = Motorwicklung A
B1 = Motorwicklung B
B2 = Motorwicklung B
GND = Masse
VMOT = Spannungsversorgung 8 – 45V DC für Motor
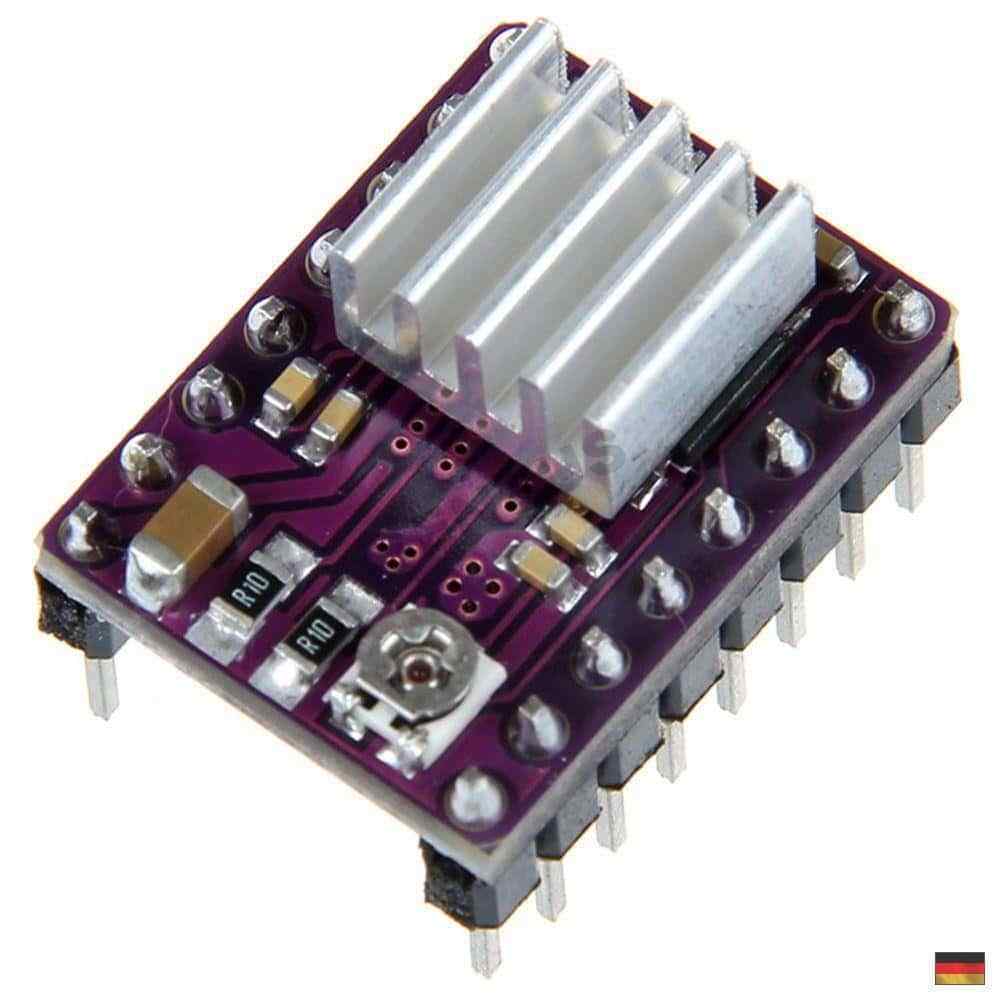
https://iknowvations.in/de/arduino/drv8825-stepper-motor-driver-with-arduino-tutorial/
DualDriver
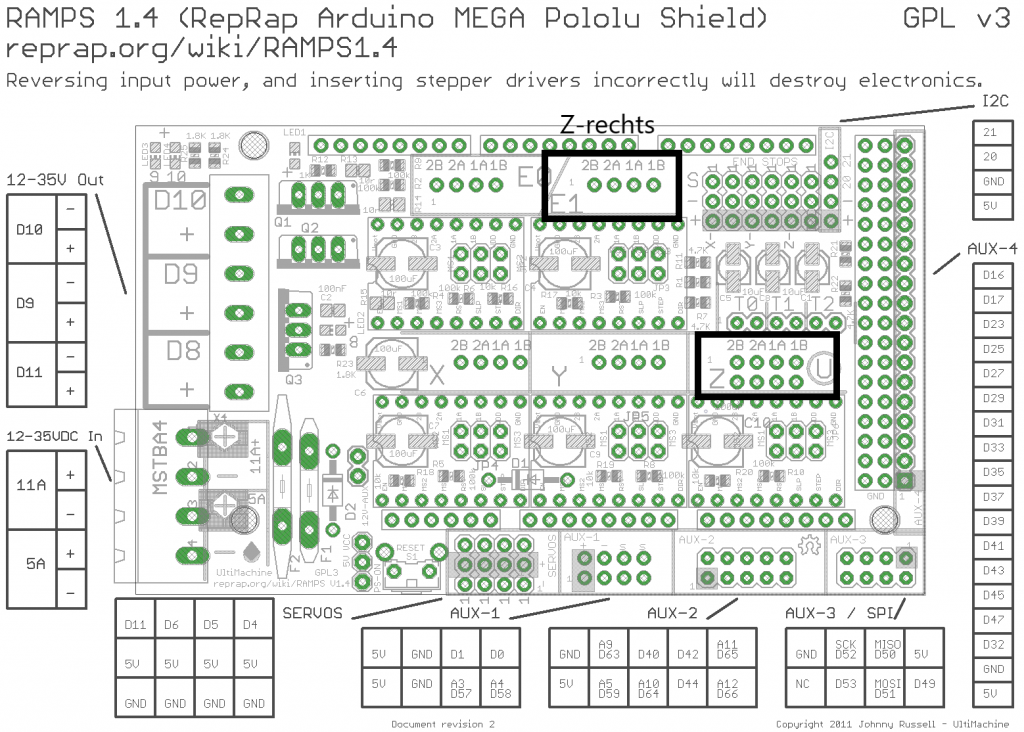
Da das Drehmoment meiner Z-Achsen recht schwach ist, habe ich die Achsen auf zwei Treiber verteilt
Der linke Schrittmotor (Z-links) ist nach wie vor auf der RAMPS 1.4 auf dem dafür vorgesehenen Platz (Z). Der rechte Schrittmotor (Z-rechts) wurde auf den zweiter Extruder (E1) umgesteckt.
Ich habe vor meinen 3D-Drucke mit einem „Auto bedleveling – Sensor“ nachzurüsten.

Ich habe im Internet folgendes bestellt:
3D-Touch von Geeetech.com
(ein bl-Touch wäre auch möglich gewesen)
Weiter habe ich die aktuelle Version von Marlin heruntergeladen:
Marlin-2.0.6
Die Halterung habe ich aus Holz hergestellt. Hier habe ich versucht den Sensor so auszurichten das er auf der Flucht zur Nozzle in der X-Achse ist. Der Abstand zur Düsenmitte beträgt 37mm:
Der 3D-Touch ersetzt den Endschalter für die Z-Achse-min.
Schwarze Ader = GND (-)
Weiße Ader = S (Signal an PIN 18)
Siehe auch 3D Drucker – Endschalter
Der Servo wird an Servo 1 angeschlossen (linke Steckleiste)
Orange Ader = Signal (an PIN 11)
Rote Ader = +
Braune Ader = GND (-)
5V am Servoausgang herstellen:
Jumper zwischen VCC und 5V stecken dann liegt am +-Pin Spannung an.
Specifications:
Voltage: 5V
Current: 15mA
Max. Current: 300mA
Cable length: 150mm
Net Weight: 10g
Shipping weight: 25g
Operate condition
3DTouch can be operated in the following condition.
One I/O for control (PWM or Software PWM)
One I/O for Z min (Z Probe)
GND and +5V power
Wiring
3-pin: Brown (-, GND), Red (+5V), Orange (control signal)
2-pin: Black (-, GND), White (Z min)
Versatz zur Düse
X = 37mm
Y = 0mm
Z = 0mm (3,..mm)
…
M280 P0 S10 = Pin ausfahren
M280 P0 S90 = Pin einfahren
M280 P0 S120 = Selbsttest starten
M280 P0 S160 = Alarm zurücksetzen (wenn er blinkt)
G28 = homing
G29 = autoleveling
M851 Z… = Offset speichern
M850 = Werte im EEProm speichern
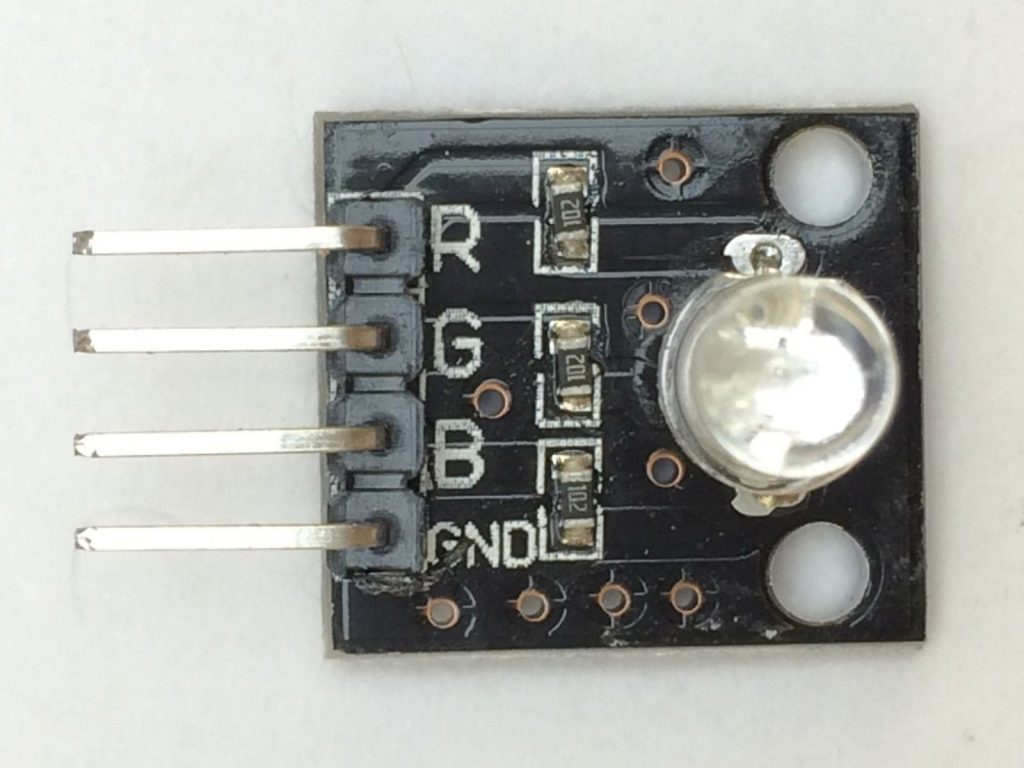
Vorwiderstände (102) mit 1kOhm sind auf dem Modul schon vorhanden.
Pinbelegung:
R = Rot
G = Grün
B = Blau
GND = Masse
// RGB LED-Modul
// Die vorhandenen Farben schalten
int BLAU = 13;
int GRUEN = 12;
int ROT = 11;
void setup() {
pinMode(BLAU, OUTPUT); // Port als Ausgang und als BLAU festlegen
pinMode(GRUEN, OUTPUT); // Port als Ausgang und als GRUEN festlegen
pinMode(ROT, OUTPUT); // Port als Ausgang und als ROT festlegen
}
void loop() {
digitalWrite(BLAU, HIGH); // Blau wird high geschaltet
delay(500); // warten
digitalWrite(BLAU, LOW); // Blau wird high geschaltet
digitalWrite(GRUEN, HIGH); // Gruen wird high geschaltet
delay(500); // warten
digitalWrite(GRUEN, LOW); // Gruen wird low geschaltet
digitalWrite(ROT, HIGH); // ROT wird high geschaltet
delay(500); // warten
digitalWrite(ROT, LOW); // ROT wird low geschaltet
}Ein Programm besteht grundsätzlich aus dem setup() – und dem loop() – Block.
Der setup()-Block wird einmal beim Neustart oder beim hochladen eines Programm auf den Arduino ausgeführt.
Der loop()-Block wird, nach dem setup()-Block, so lange zyklisch wiederholt bis der Arduino ausgeschaltet wird.
// Allgemeine Programmstruktur
//
// Ausgabe von "Hallo Welt" am Seriellen Monitor über die Serielle Schnittstelle
//
void setup() {
// initialisiere die serielle Kommunikation mit 9600bps:
Serial.begin(9600); }
void loop() {
Serial.println("Hallo Welt!" );
// warte 10ms bis zur nächsten loop()-Ausführung.
delay(10); }Achtung:
Wenn die Serielle Schnittstelle verwendet wird, dürfen die Ports 0 und 1 nicht verwendet werden.
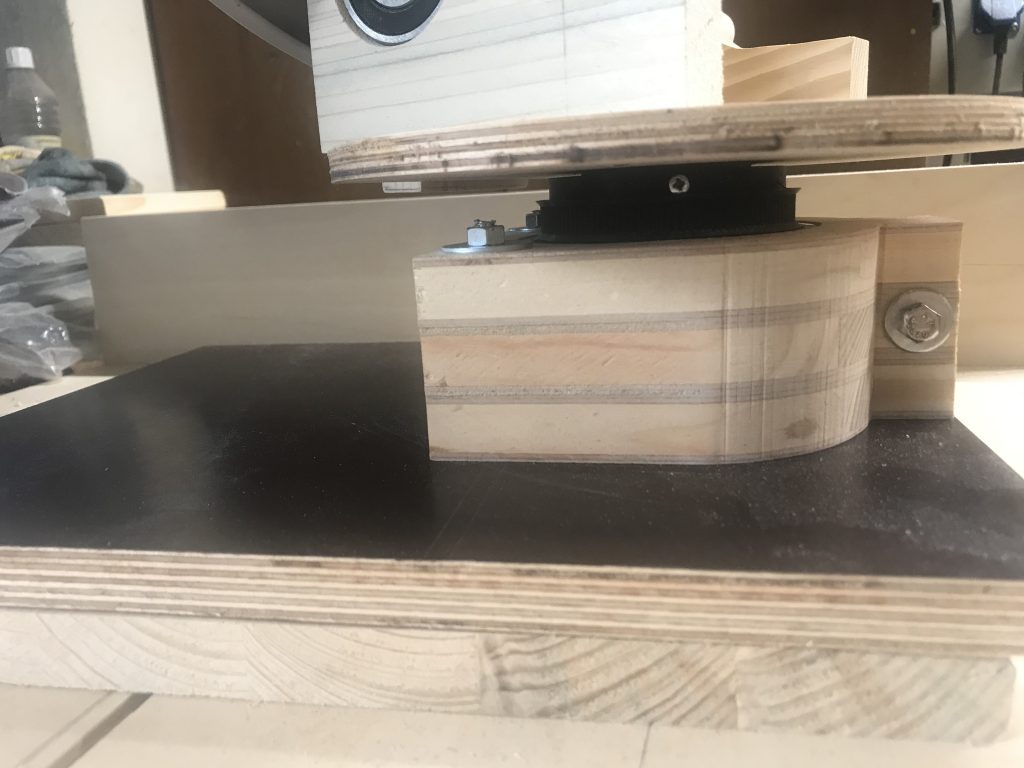
Die Hardware ist zum großen Teil aus Holz.
Die 3D-Drucke stammen von TNT3Dprint.de.
Zahnriemenscheibe Azimut:
teeth = 120; // Number of teeth
profile = 12; //12=GT2_2mm
motor_shaft = 50.1; // NEMA17 motor shaft exact diameter = 5
m3_dia = 3.2; // 3mm hole diameter
m3_nut_hex = 1; // 1 for hex
m3_nut_flats = 5.7; // normal M3 hex nut exact width = 5.5
m3_nut_depth = 2.7; // normal M3 hex nut exact depth = 2.4
retainer = 1; // Belt retainer above teeth
retainer_ht = 1.5; // height of retainer flange over pulley
idler = 1; // Belt retainer below teeth
idler_ht = 1.5; // height of idler flange over pulley
pulley_t_ht = 8; // length of toothed part of pulley
pulley_b_ht = 8; // pulley base height
pulley_b_dia = 70; // pulley base diameter
no_of_nuts = 3; // number of captive nuts required
nut_angle = 120; // angle between nuts
nut_shaft_distance = 1.2; // distance between inner face of nut and shaft

Der Lagerbockbesteht aus drei aufeinandergeleimte Multiplexplatten. In diese wurde unten und oben ein Lager, Innendurchmesser 50mm eingesetzt.
Lager: 2 x Rillenkugellager 6010 2RS 50 x 80 x 16 mm
Azimutwinkel berechnen:
A = Azimutwinkel
gLE = geographische Länge des Empfangsort
gBE = geographische Breite des Empfangsort
gLS = geographische Länge der Satelittenposition
tan(gLE – gLS)
A = 180° + arctan ————–
sin gBE
Für Astra mit 19,2 Ost würde das z.B. so aussehen:
gLE = 8,7582988 (Längengrad für Knittlingen)
gBE = 49,0240107 (Breitengrad für Knittlingen)
gLS = 19,2
tan(8,7582988 – 19,2)
A = 180° + arctan ——————-
sin 49,0240107
Elevation berechnen:
GPS-Koordinaten für Knittingen:
49° 1′ 26.439″ N
8° 45′ 29.876″ E
http://www.fen-net.de/satellitentechnik-online/texte/orbit/azimut.htm
// Azimut und Elevation berechnen
void setup() {
double A; // Azimutwinkel
double E; // Elevationswinkel
// Daten für Stuttgart
String Ort = "Stuttgart";
float gLE = 9.2L; // Längengrad Stuttgart
float gBE = 48.8L; // Breitengrad Stuttgart
// Daten für Berlin
/*String Ort = "Berlin";
float gLE = 13.4L; // Längengrad Berlin
float gBE = 52.5L; // Breitengrad Berlin
*/
String Satellit = "Astra 19,2 Ost";
float gLS = 19.2L; // Längengrad Astra
//string Satellit = "Eutelsat F2 10,0 Ost";
//float gLS = 10.0L; // Längengrad Eutelsat F2
// Die Grademaße in Bogenmaße umrechnen
float L = 3.14/180 * gLE;
float B = 3.14/180 * gBE;
float P = 3.14/180 * gLS;
// Azimut in Gradmaß berechnen
A = 180 + 180/3.14 * atan (tan(L - P) / sin(B));
// Elevation im Gradmaß berechnen
E = 180/3.14 * atan (((cos(B) * cos(L - P)) -0.1513) / sqrt(1-sq(cos(B) * cos(L - P))));
// initialisiere die serielle Kommunikation mit 9600bps:
Serial.begin(9600);
// Ausgabe der berechneten Winkel
Serial.println ("Ort: " + Ort);
Serial.println ("Satellit: " + Satellit);
Serial.print ("Azimut = ");
Serial.print (A);
Serial.print (" Elevation = ");
Serial.println (E);
}Für die Ansteuerung der Schrittmotoren wird ein RAMPS 1.4 – Shield verwendet. Folgende Anschlüsse werden verwendet
Azimut
E0 = Anschluss für den Schrittmotor „Azimut“
X_MIN = Endschalter Azimut MIN
X_MAX = Endschalter Azimut MAX
Elevation
E1 = Anschluss für den Schrittmotor „Elevation“
Y_MIN = Endschalter Elevation MIN
Y_MAX = Endschalter Elevation MAX
Der Kompassensor so wie eventuell weitere Sensoren werden über den I2C-Bus am RAMPS 1.4 angeschlossen
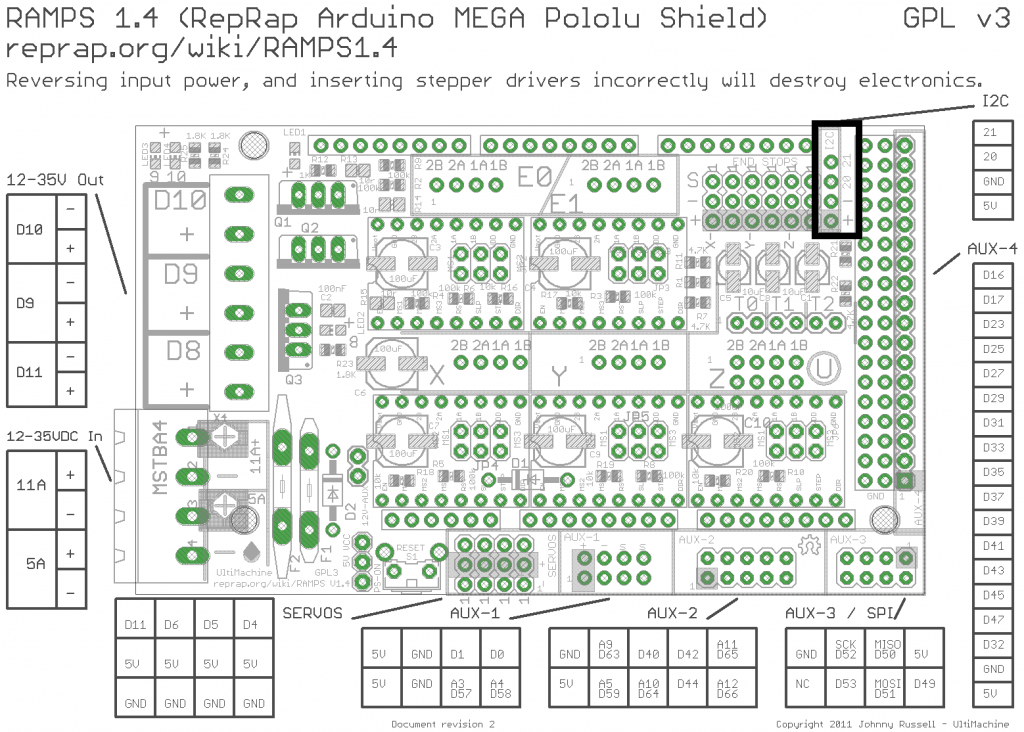
5V = rot
GND = schwarz
20 = blau
21 = grün

Ablage, u.a. für Handy‘s, für mein Geschäftsfahrzeug gebastelt.

Abdeckung

Die ersten beiden Bienenbeuten sind so weit fertig.
Die Beuten wurden nach der Anleitung des Imkerverei Gaggenau gebaut.